

Pose synchronization method and device for arc locus motion of robot
A trajectory motion and robot technology, applied in the field of pose synchronization, can solve the problems that poses are difficult to guarantee continuous, cannot normalize variables, and are difficult to apply, and achieve the effect of simple mathematical model and avoidance of unclear physical meaning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
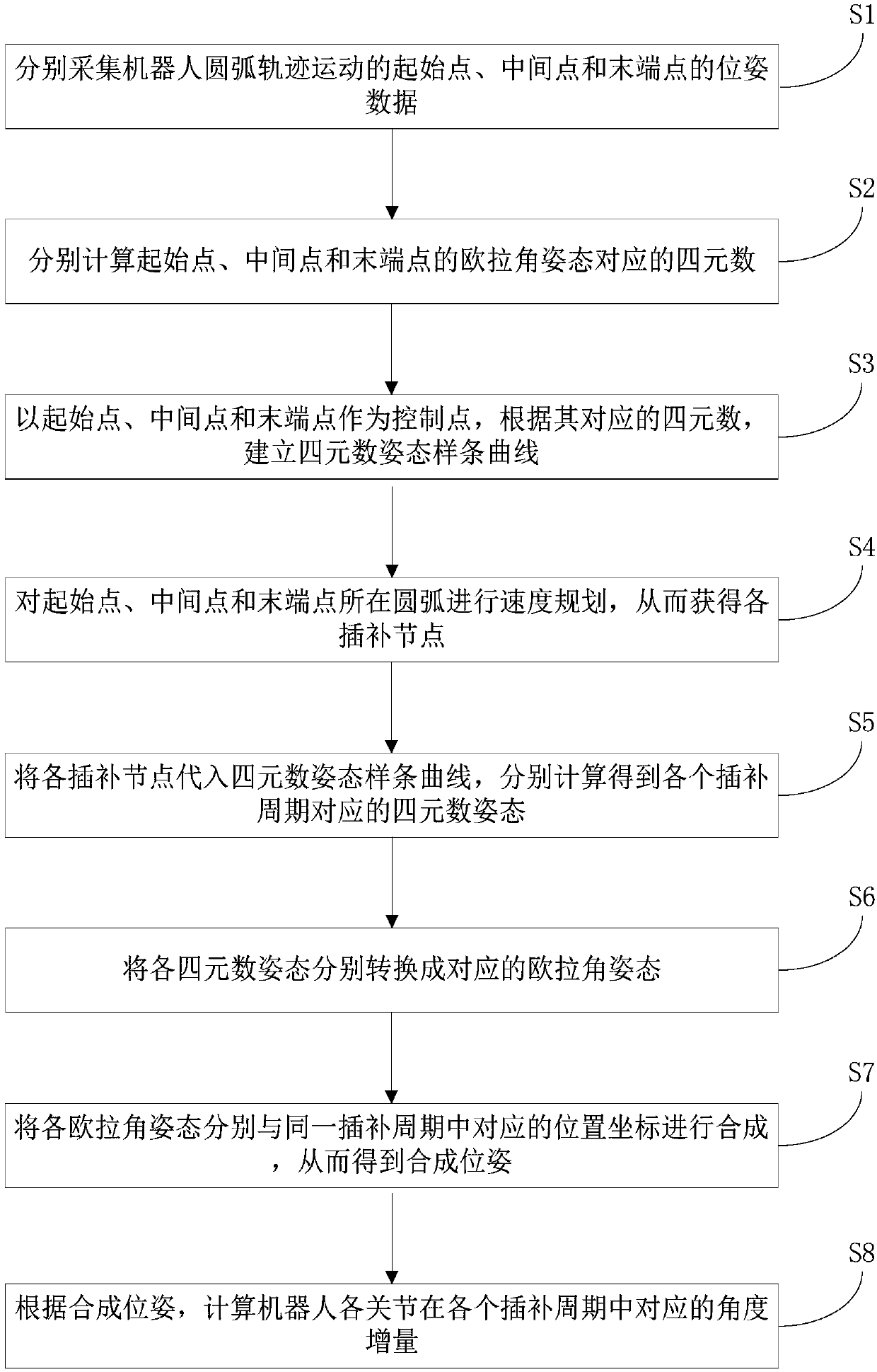
[0063] The present invention is a pose synchronization method aimed at robot circular trajectory movement, such as figure 1 shown, including the following steps:
[0064] S1. Collect the pose data of the starting point, middle point and end point of the arc track movement of the robot respectively; the starting point, middle point and end point are any three non-collinear points in the robot workspace; the position Attitude data includes position coordinates and Euler angle attitude;
[0065] S2. Calculate the quaternion corresponding to the Euler angle attitude of the starting point, the middle point and the end point respectively;
[0066] S3. Using the starting point, the middle point and the end point as control points, according to the corresponding quaternion, establish a quaternion attitude spline curve;
[0067] S4. Perform speed planning on the arcs where the starting point, intermediate point, and end point are located, so as to obtain each interpolation node; each...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More