

Underwater terrain-aided navigation method based on adaptive sampling particle filter
An adaptive sampling and underwater terrain technology, applied in navigation calculation tools, navigation through speed/acceleration measurement, measurement devices, etc., to achieve the effect of improving the effectiveness and improving the real-time performance of navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be described in further detail below with reference to the accompanying drawings and specific embodiments.
[0041] combine Figures 1 to 6b , an underwater terrain aided navigation method based on adaptive particle filtering of the present invention, comprising the following steps:
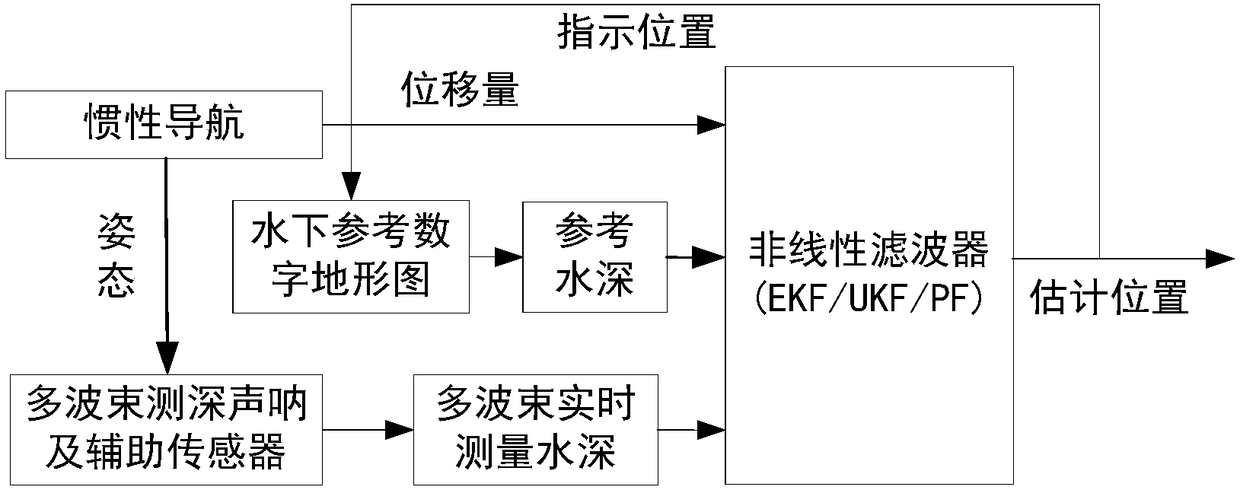
[0042] Step (1) takes the inertial navigation position error as the state, and uses the multi-beam bathymetric sonar as the underwater terrain measurement sensor to establish a state space model and a measurement model of the underwater terrain-assisted navigation;
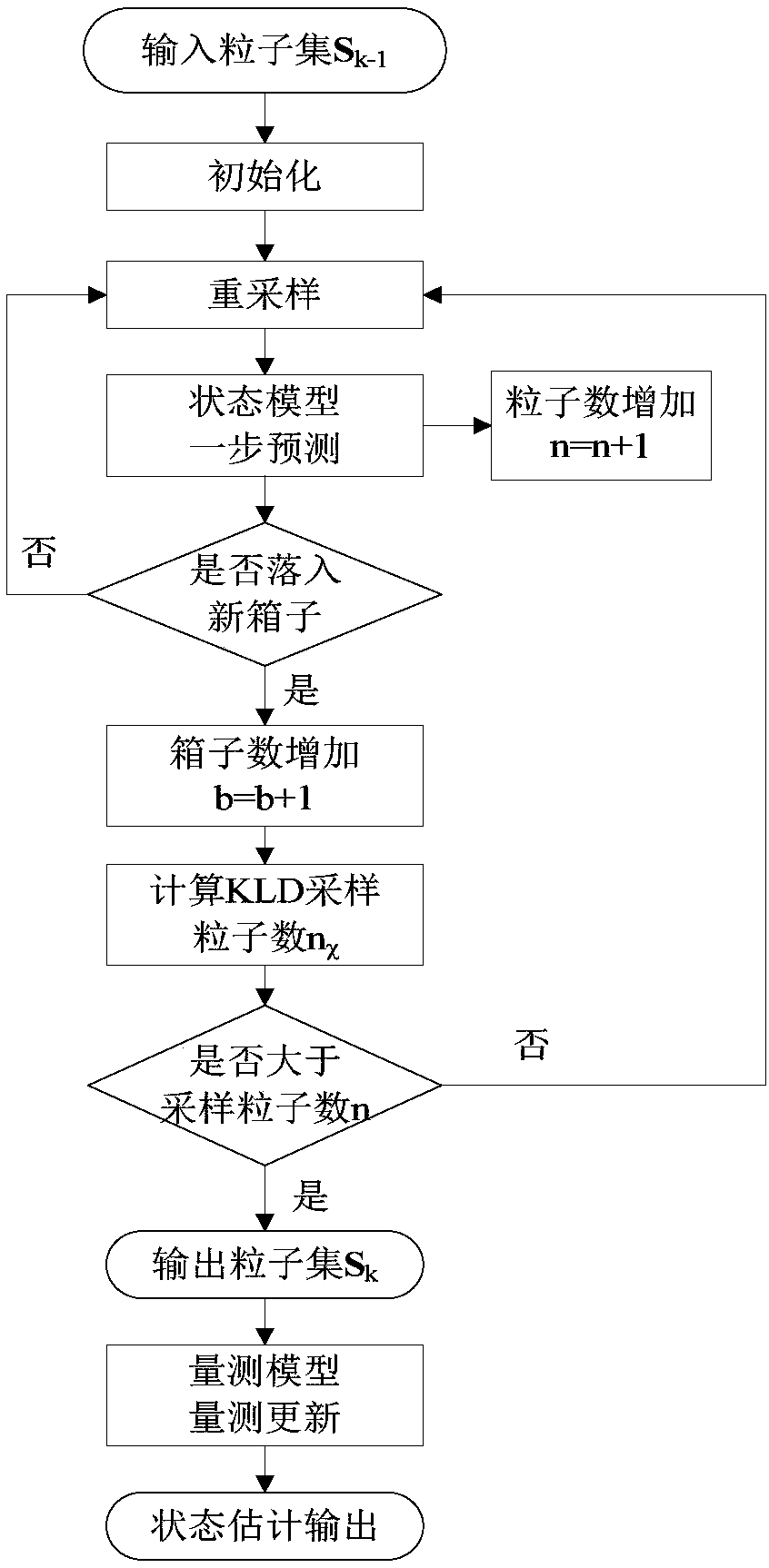
[0043]Step (2) According to the initial position error state distribution, initial particles are generated, and one-step prediction particle update is performed by the state space model to obtain a predicted particle set, and in the one-step prediction particle update process, the KLD sampling technique is used to adjust the number of particles;
[0044] Step (3) When the multi-beam measurement valu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More