

Human skeleton tracking system and method based on multiple kinects
A human skeleton and tracking system technology, applied in the field of vision, can solve the problems of user self-occlusion, low registration accuracy, failure to deal with external interference and noise, etc., achieve the effect of accurate skeleton information and solve noise interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In the following description, for purposes of explanation, numerous specific details are set forth in order to provide a thorough understanding of one or more embodiments. It may be evident, however, that these embodiments may be practiced without these specific details. Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0029] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
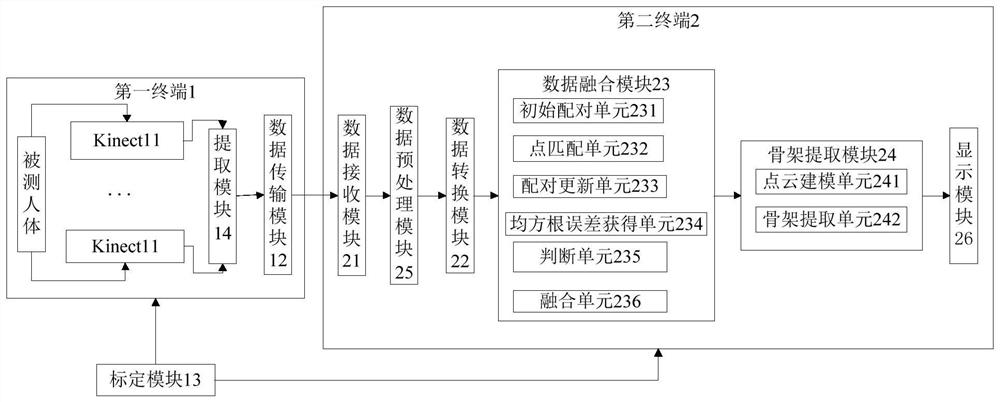
[0030] figure 1 It is a block diagram of the composition of the multi-Kinect-based human skeleton tracking system of the present invention, as figure 1 As shown, the human skeleton tracking system described in this embodiment includes:
[0031] The first terminal 1 comprises a plurality of Kinect11 and data transmission module 12, each Kinect11 gathers human body image, transforms it into point cloud data and transmits to the second termina...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More