

Multifunctional eight-claw robot for investigating manholes of underground pipeline and investigation method thereof
A technology for underground pipelines and robots, applied in the field of robots, can solve problems such as low efficiency, inability to adapt to all-terrain detection, human harm, etc., and achieve the effects of simple cleaning performance, friendly man-machine interface, and intelligent query cleaning performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] See figure 1 In this embodiment, a multifunctional eight-jaw robot for detecting underground pipelines and manholes collects live images through a camera, collects corresponding gas data in the pipeline through a gas sensor, and transmits all data to the remote control system through Ethernet. The control system Monitor the pipeline environment, and control the walking of the eight-jaw robot and the operation of the manipulator. The body is butterfly-shaped, including:
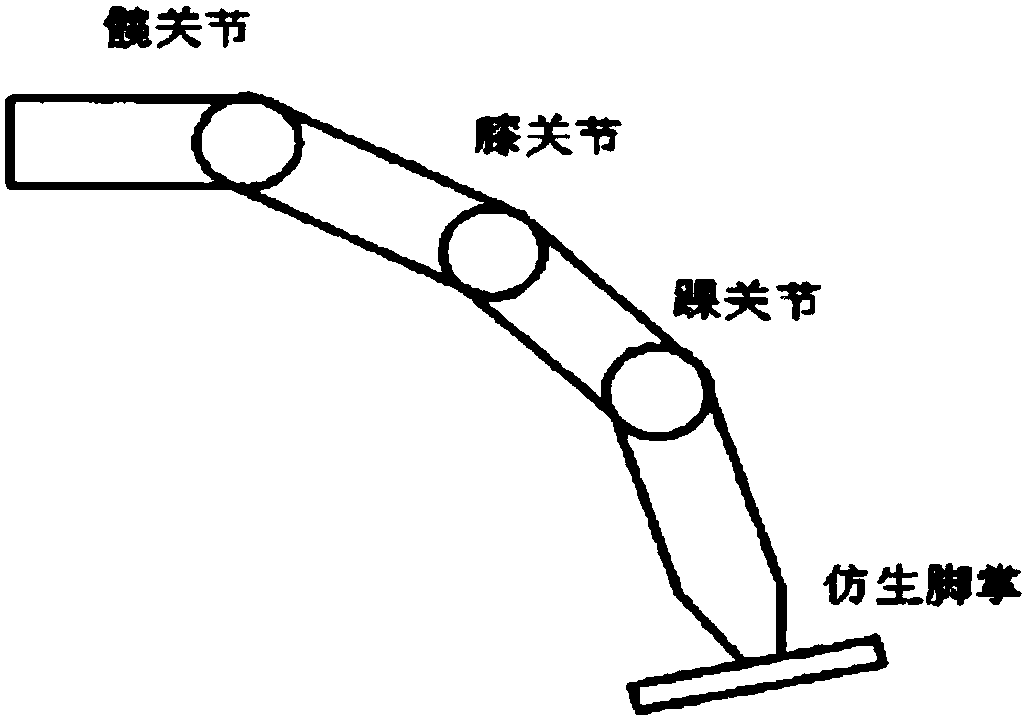
[0031] The walking module, including the bionic sole and the foot, is designed as an 8-toe structure with 8 toe sections evenly distributed. The sole and the foot pass through the ball hinge joints, thus adapting to complex all-terrain. See figure 2 , The foot is connected to the sole of the foot and includes three active joints, namely the hip joint, the knee joint and the ankle joint. Each active joint is driven by a steering gear. Each foot includes a base section, a femoral section and a patella sectio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More