

Design method for PNKF-VB
A Kalman filter, variational Bayesian technology, applied in the field of filters, can solve problems such as large amount of calculation of nonlinear filters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0084] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
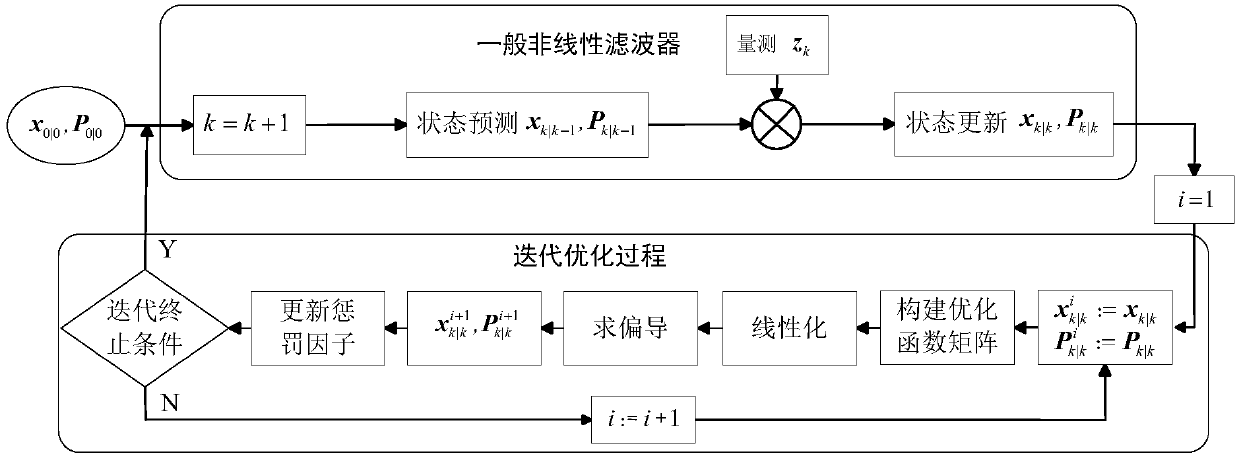
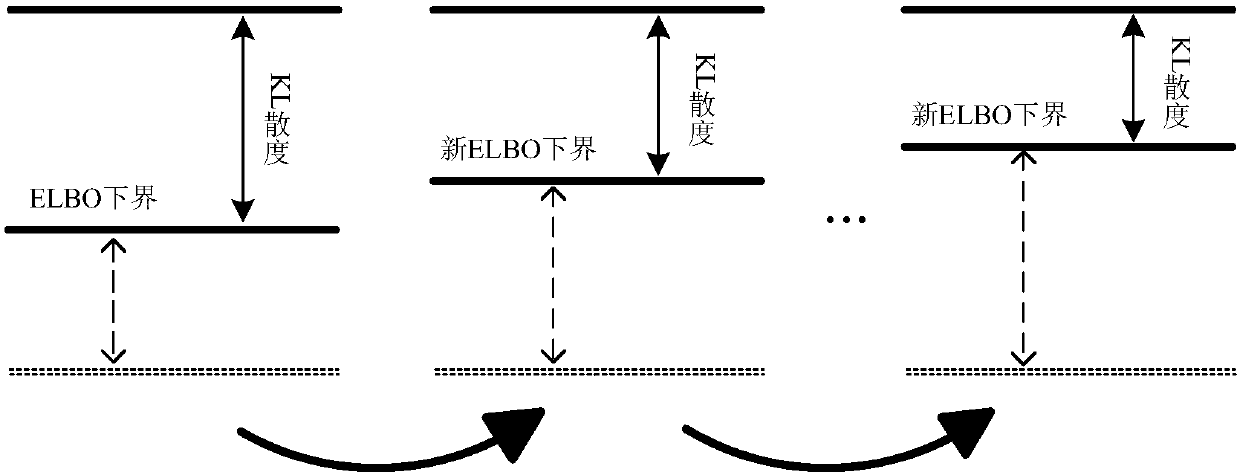
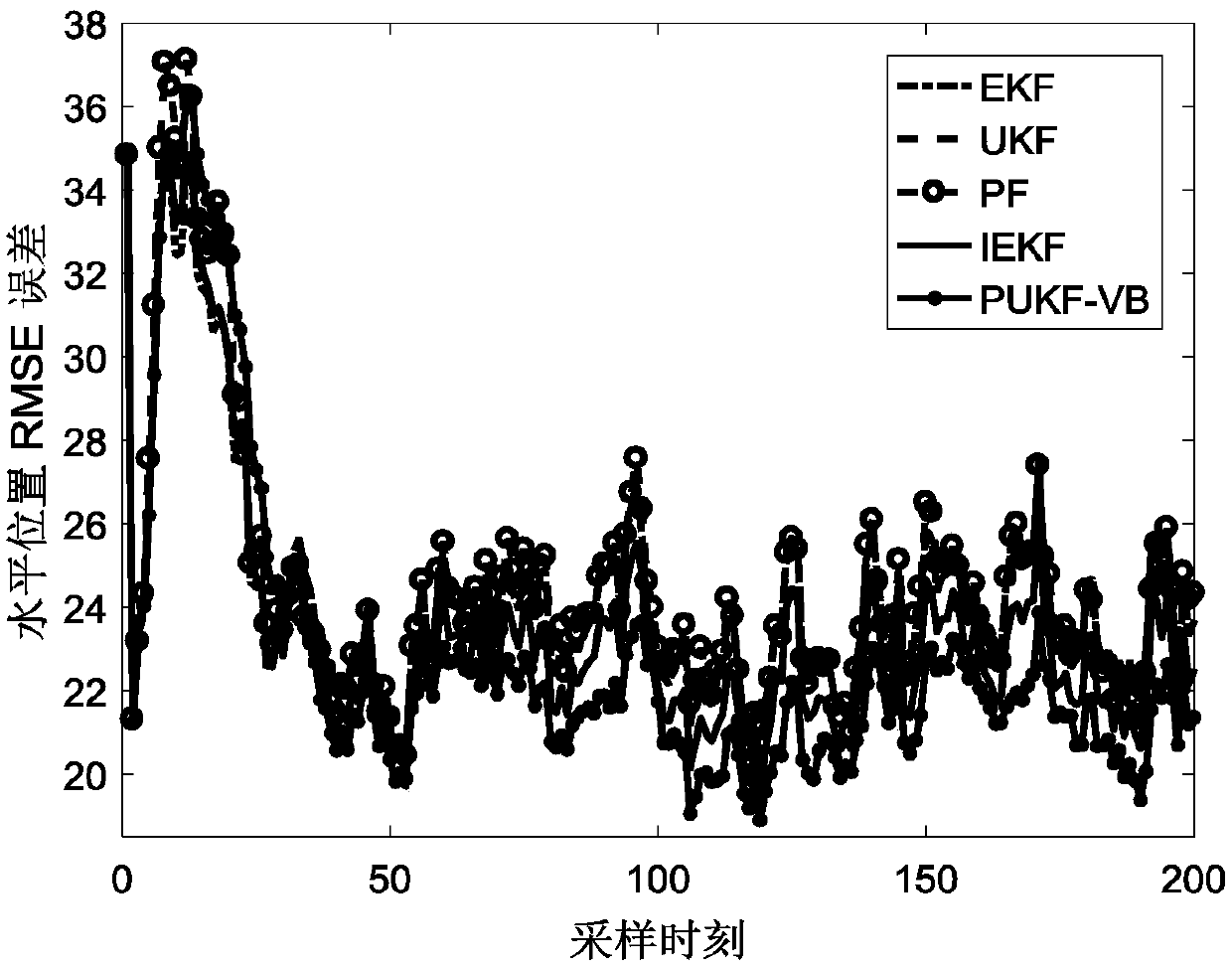
[0085] State estimation is often accompanied by nonlinear problems, such as the tracking of maneuvering targets, intelligent vehicle positioning and navigation, etc. The optimal solution requires a complete description of the conditional posterior probability, but this precise description requires endless parameters, and It cannot be practically applied, and only some specific problems can be optimally solved. Therefore, a nonlinear filter capable of approximating the posterior probability density function with a more "tight" distribution is needed to improve the accuracy of state estimation. The invention relates to a nonlinear Kalman filter of variational Bayesian. Unlike conventional nonlinear filters based on linearization methods and filters based on sampling methods, the proposed algorithm is capable of near-end iterative approximation of nonlinea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More