

A method and system for image depth estimation based on CNN and depth filter
An image depth and depth estimation technology, applied in the field of 3D vision, can solve problems such as pure rotation cannot be calculated, absolute scale loss, time-consuming, etc., to achieve the effect of overcoming object edge blur, overcoming absolute scale loss, and reducing the number of iterations required
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to make the purpose, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and examples.
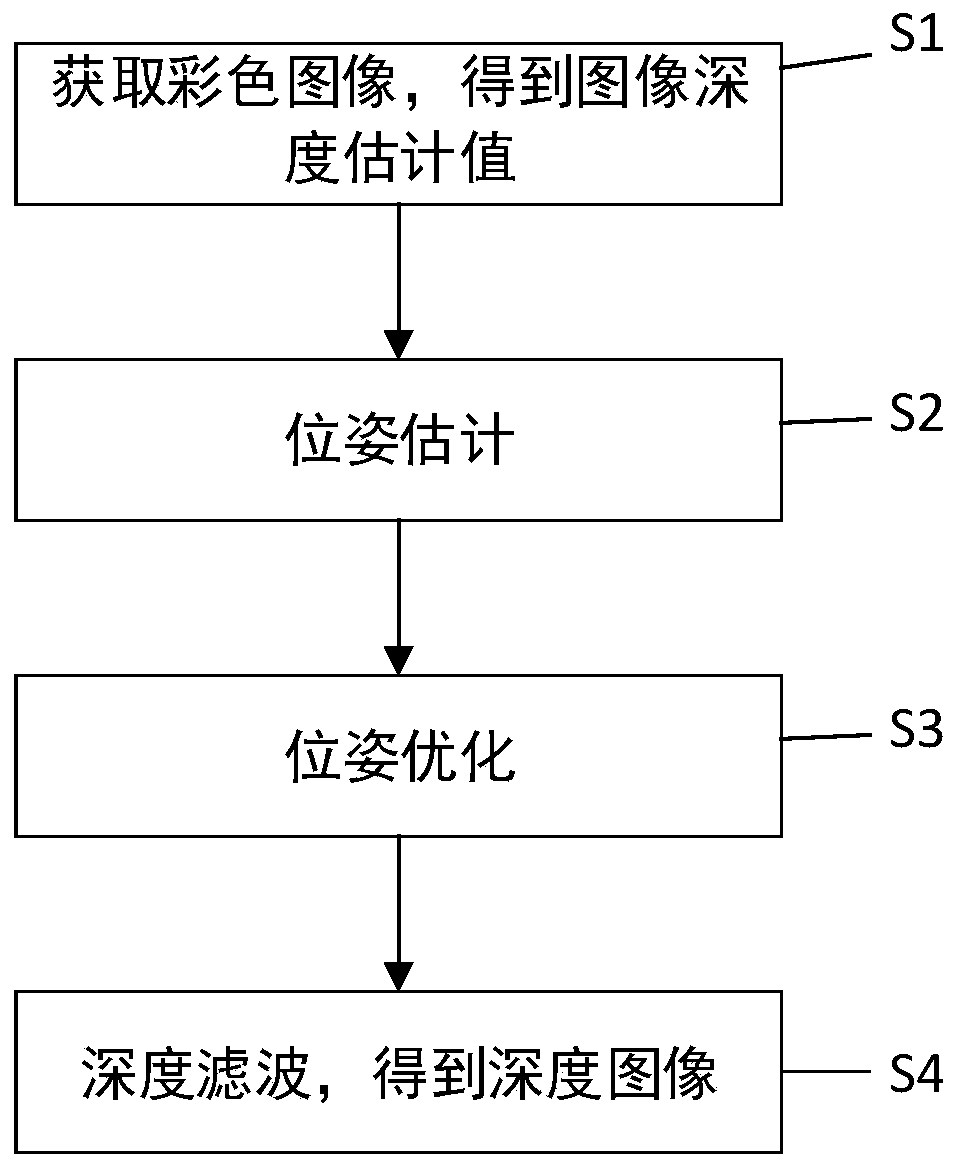
[0041] The specific process of image depth estimation method based on CNN and depth filter is as follows: figure 1 As shown, the method is divided into four parts: obtaining image depth estimates, pose estimation, pose optimization, and depth image acquisition.
[0042] 1. Obtain image depth estimates
[0043] Obtain multiple color images continuously shot by the camera on the same shooting target, select one of the color images as a reference image, and the remaining color images as associated images, and obtain the depth estimation value corresponding to each pixel of the reference image through CNN.
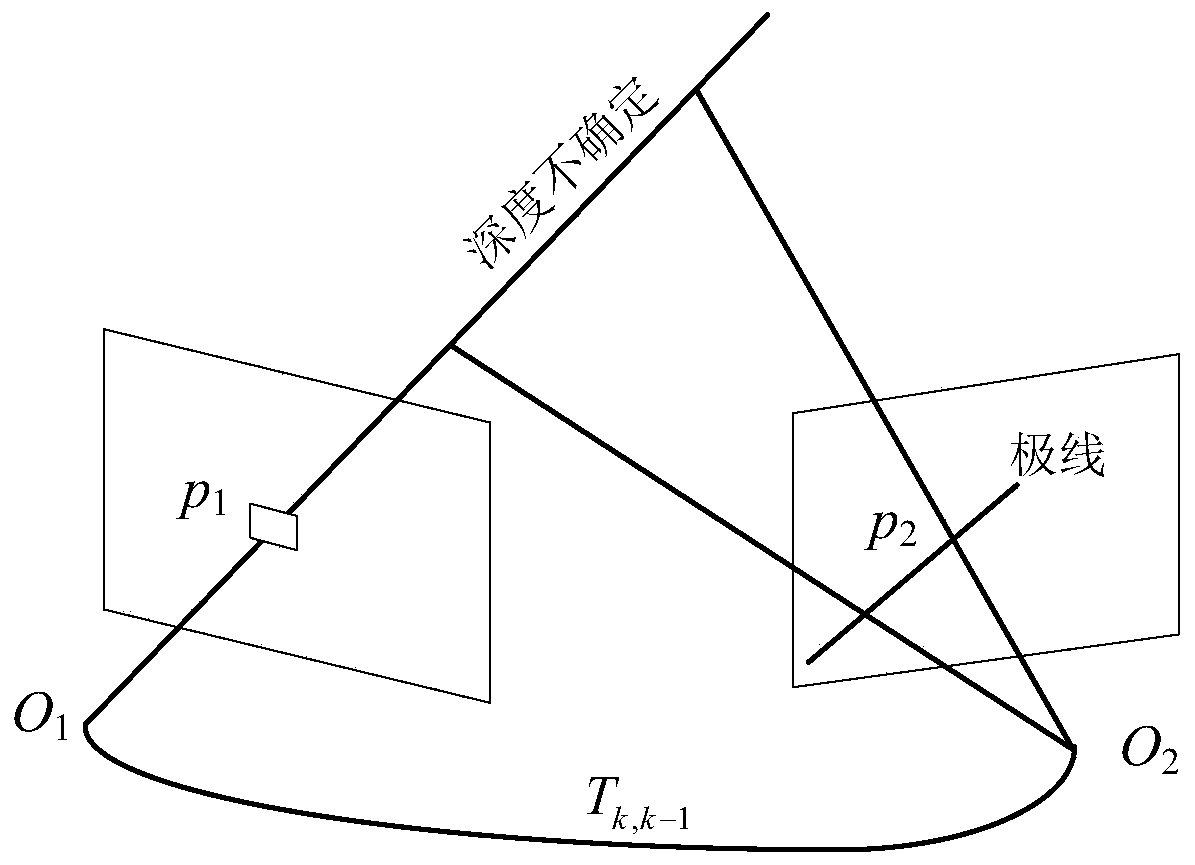
[0044] 2. Pose estimation
[0045] In the pose (camera translation and rotation) estimation stage, set the image collected at time k as I k , ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More