

Pickup truck type vehicle-mounted unmanned aerial vehicle intelligent take-off and landing and autonomous endurance system
A technology for drones and pickup trucks, which is applied to vehicle energy storage, vehicles, motor vehicles, etc. It can solve the impact of landing, but cannot solve the problems of omnidirectional movement of drones and reduced range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
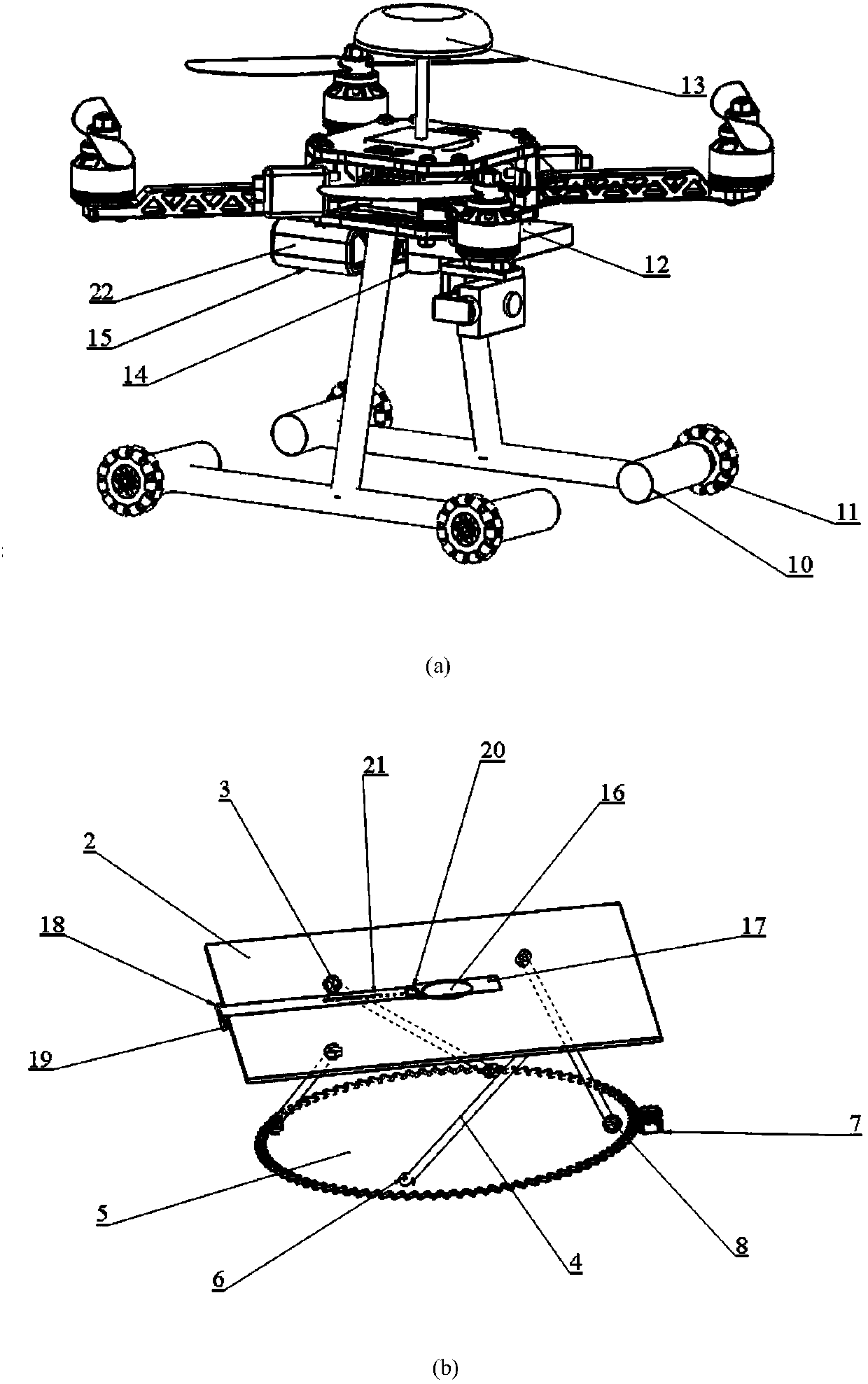
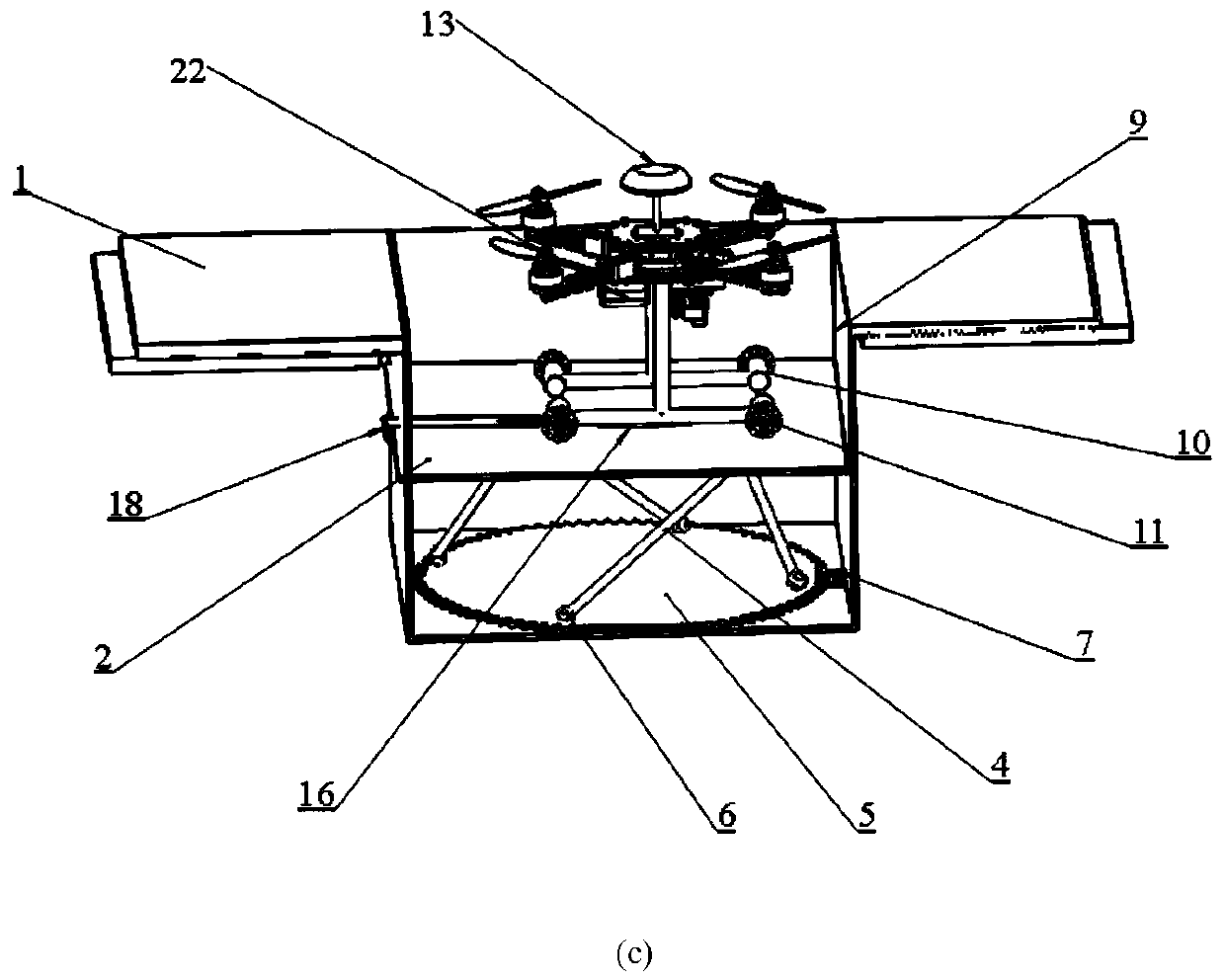
[0071] The following uses a pickup truck as a carrier to introduce the specific working process of the drone flying and recovery system of the present invention. In the process of unmanned aerial vehicle flying and recovery, automatic charging, rising and falling of the platform, it mainly uses structures such as geared motors, driving motors, GPS modules, wireless charging modules, infrared sensors and lithium batteries; in terms of algorithms, it mainly relies on Vision and mecanum wheel landing algorithm and omnidirectional positioning algorithm realize the precise positioning of UAV. A schematic diagram of the Figure 6 shown.
[0072] The specific parameters of the structure are as follows:
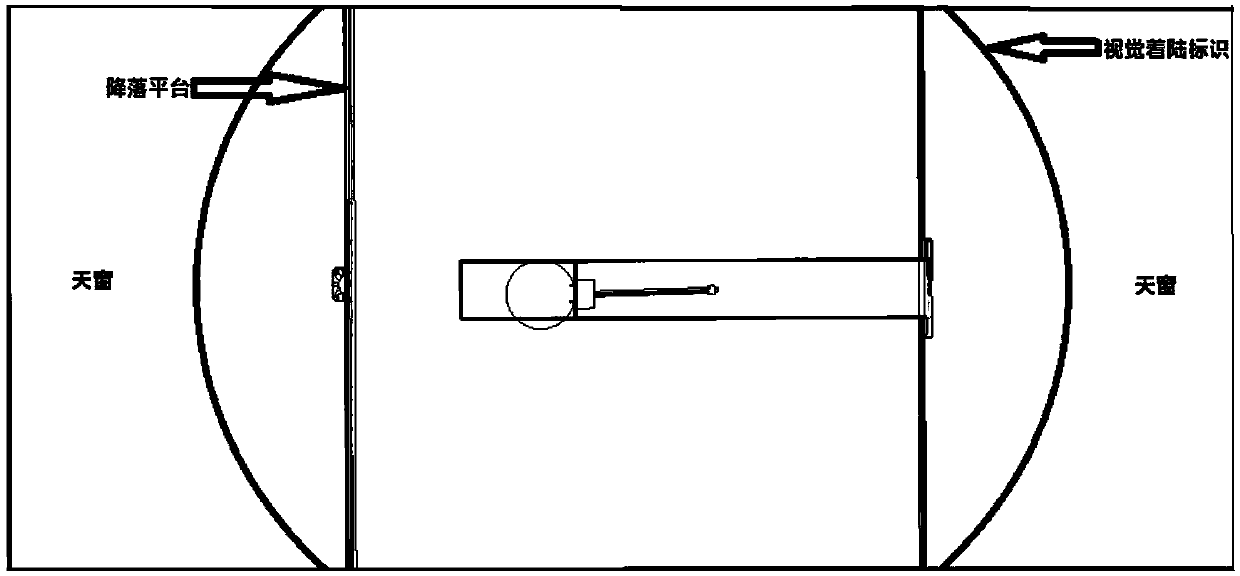
[0073] First, the UAV landing platform of the present invention is a platform of 1.5 square meters, and the maximum opening area of the skylight is consistent with the size of the landing platform. A 1.2-square-meter circular platform with gears is selected for the lower rotatin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More