Topological three-dimensional suspended structure curtain wall cleaning robot system and motion control method
A cleaning robot and suspension system technology, which is applied in the field of special robot cleaning applications, can solve problems such as limited use scenarios, and achieve the effects of strong system scalability, simple operation, and easy installation methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
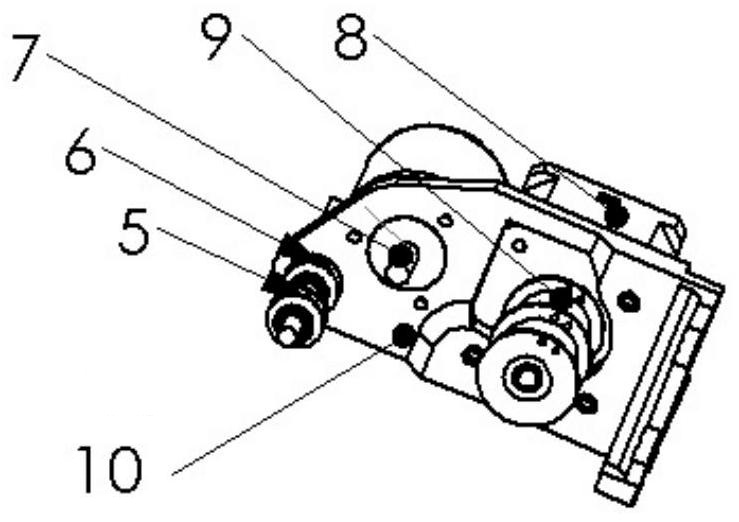
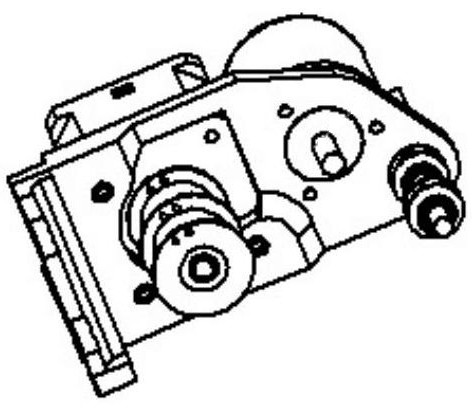
[0066] For medium and high-rise buildings below 100 meters, it is a non-planar exposed frame glass curtain wall. When working, place the left tractor 1 and the right tractor 2 respectively at the two ends of the top of the curtain wall building to be operated, and the cleaning actuator 4 passes through. The array of ropes 3 is connected to the left and right tractors, and is suspended on the building surface of the curtain wall to be operated. When the push rod 12 is not extended, the cleaner 14 does not touch the wall, and the main body of the cleaning actuator, the cleaner and the rope are in a natural drooping state , the cleaning actuator can move freely across the structural obstacles on the surface of the exposed frame curtain wall. After the operator sets the cleaning task through the man-machine central controller, he operates the push rod through the controller. When the push rod 12 is stretched out, the cleaner 14 When it touches the wall, the push rod 12 continues to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More