

Cylinder-driven robot joint device
A technology driven by robot joints and cylinders, used in passive exercise equipment, sports accessories, gymnastics equipment, etc., can solve the problems of high price, difficult and low-cost design, and large size of dynamic torque sensors, and achieve obvious flexibility and safety. , taking into account the quality and overcoming the effect of layout limitations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by a person of ordinary skill in the art fall within the protection scope of the present invention.
[0019] In order to facilitate the understanding of the above-mentioned technical solutions of the present invention, the above-mentioned technical solutions of the present invention will be described in detail below through specific usage.
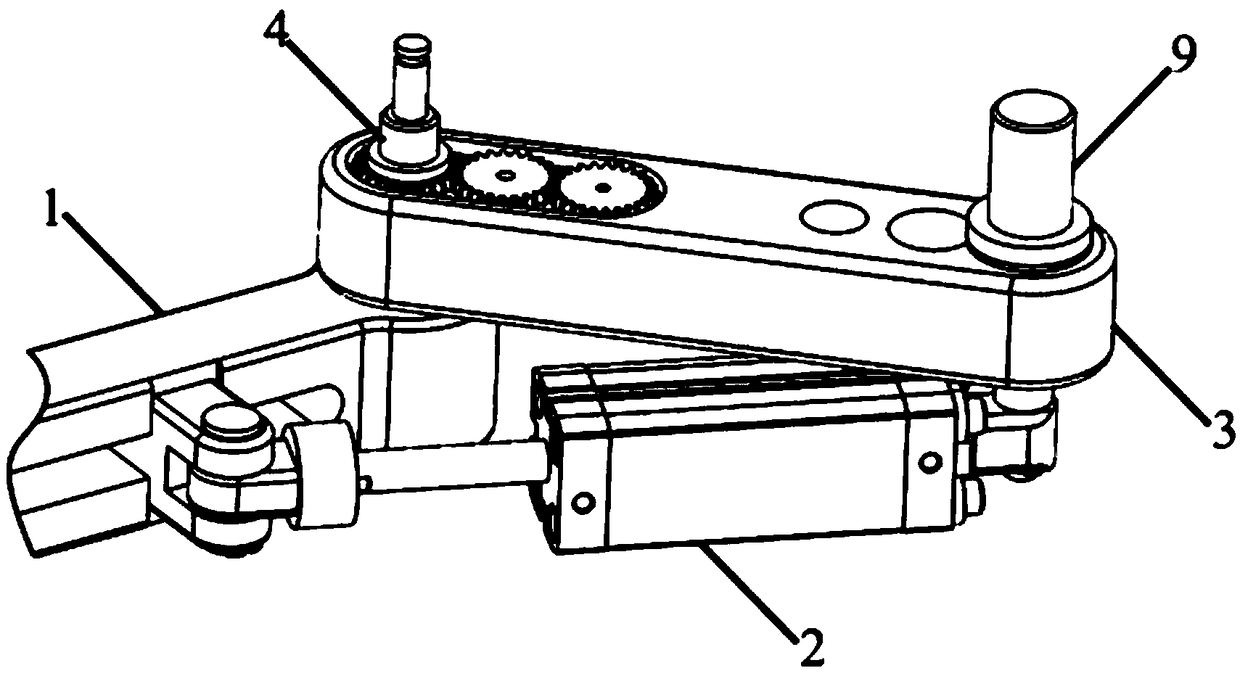
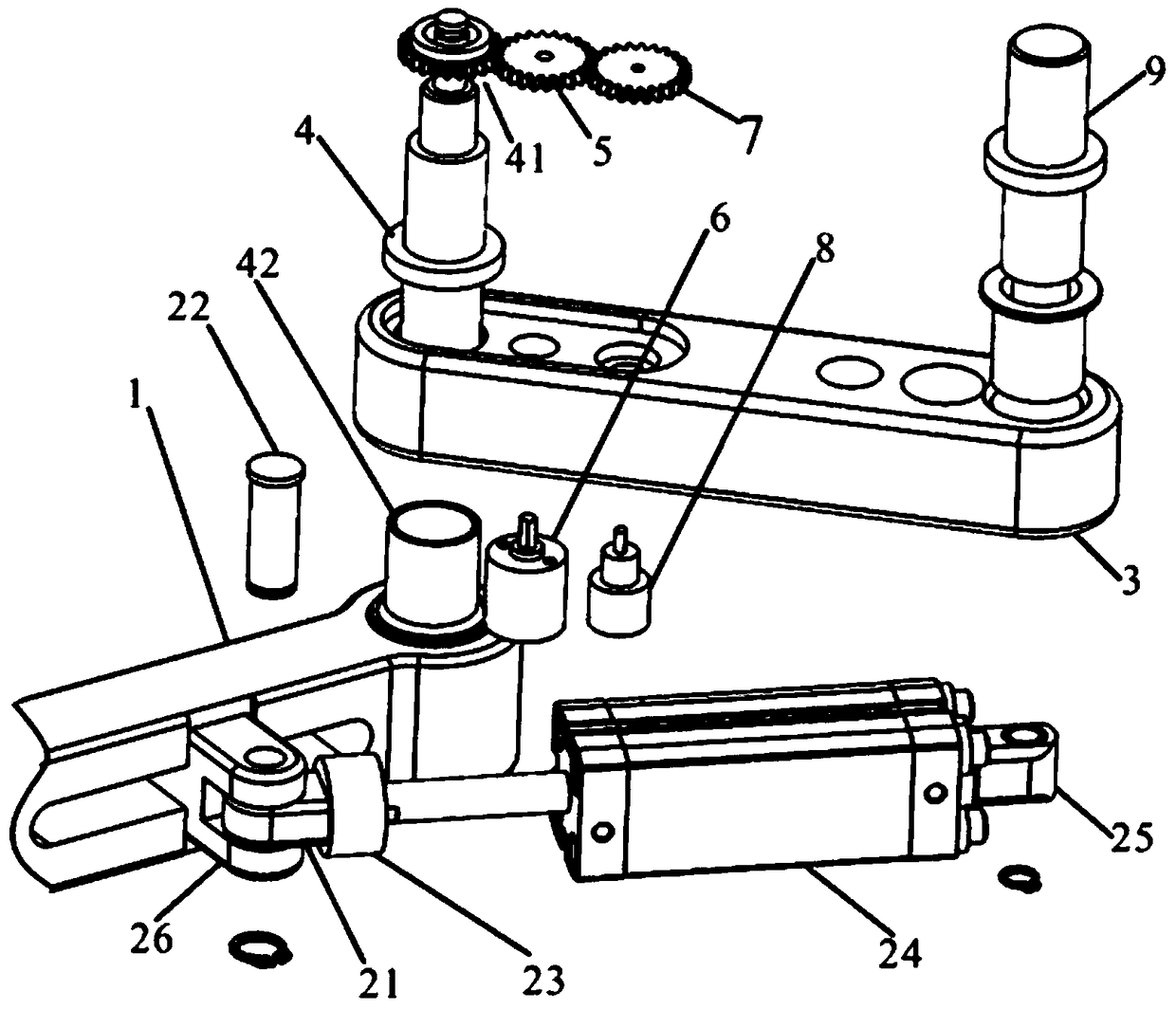
[0020] Such as figure 1 with figure 2 As shown, a cylinder-driven robot joint device of the present invention includes a base beam 1, a cylinder assembly 2, a shoulder joint rotating arm 3, a first connecting shaft 4, an incr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More