

A system and method for grabbing a robotic arm based on image processing
An image processing and robotic arm technology, applied in the field of intelligent robots, can solve the problems of low recognition rate, single purpose, lack of trajectory optimization simulation platform, etc., and achieve the effect of reducing errors and wide applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The following will clearly and completely describe the technical solutions in the embodiments of the present application with reference to the accompanying drawings in the embodiments of the present application. Obviously, the described embodiments are only for illustration, and are not intended to limit the present application.
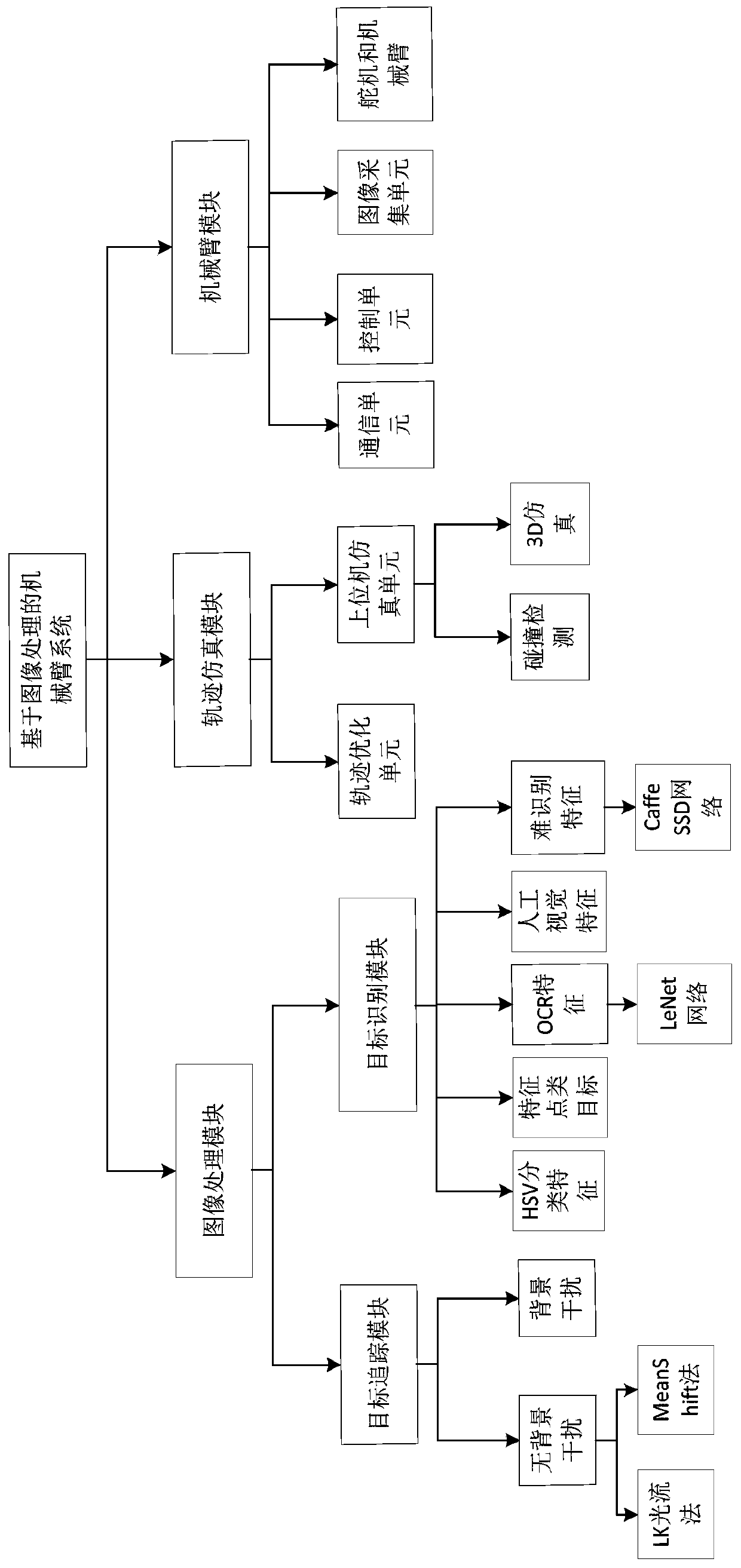
[0062] figure 1 It is a compositional block diagram of the image processing-based manipulator grasping system of the present invention, including a manipulator module, a trajectory simulation module and an image processing module. The manipulator module includes an image acquisition unit, a communication unit, a control unit, a steering gear and a manipulator. The image acquisition unit is composed of a binocular CCD camera to realize image information acquisition; the control unit includes an embedded control unit composed of an Arduino UNO controller. The control board can use the USB interface to power the system; the communication unit con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More