

Local reference point-based quick point cloud registration method
A point cloud registration and reference point technology, applied in the field of 3D reconstruction, can solve the problems of high overlap rate, small motion, and large time-consuming, and achieve the effect of high applicability, improved registration effect, and low computational complexity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0046] The present invention provides a fast point cloud registration method based on local reference points, aiming to solve the problem of high time complexity when existing algorithms meet registration accuracy.
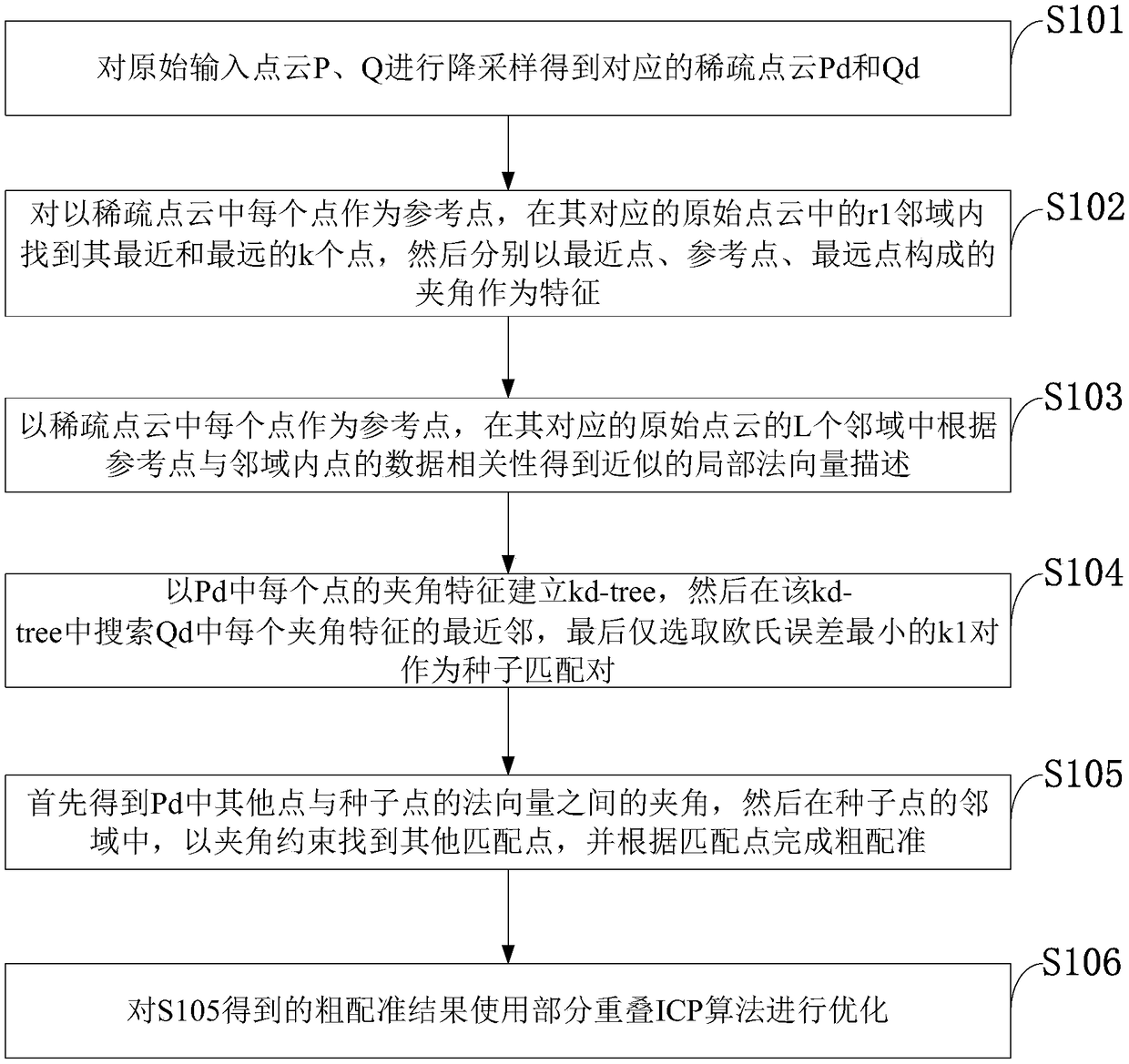
[0047] Such as figure 1 As shown, the local reference point-based fast point cloud registration method provided by the embodiment of the present invention includes the following steps:
[0048] S101: Downsampling the original input point clouds P and Q to obtain corresponding sparse point clouds Pd and Qd;
[0049] S102: Use each point in the sparse point cloud as a reference point, find the nearest and fart...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More