

A motion control method of a six-degree-of-freedom wrist-biased series manipulator
A motion control, robotic arm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of reduced convergence speed and calculation accuracy, low control accuracy, and difficulty in adding constraints, so as to improve convergence speed and calculation accuracy. Accuracy, simplify the control process, improve the effect of control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] In order to make the purpose, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. The specific embodiments described here are only used to explain the present invention, not to limit the present invention.
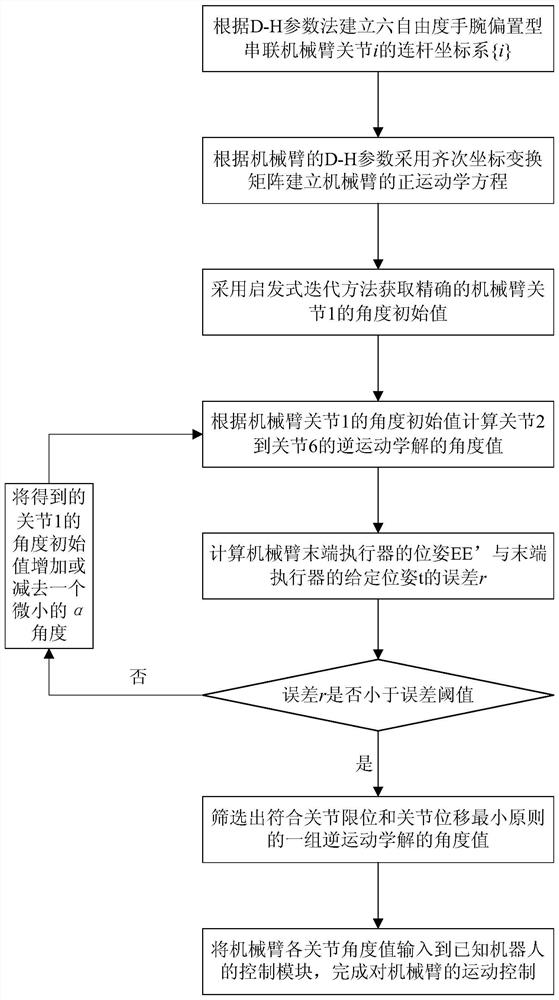
[0075] A motion control method of a six-degree-of-freedom wrist-biased serial manipulator, the process is as follows figure 1 shown, including the following steps:
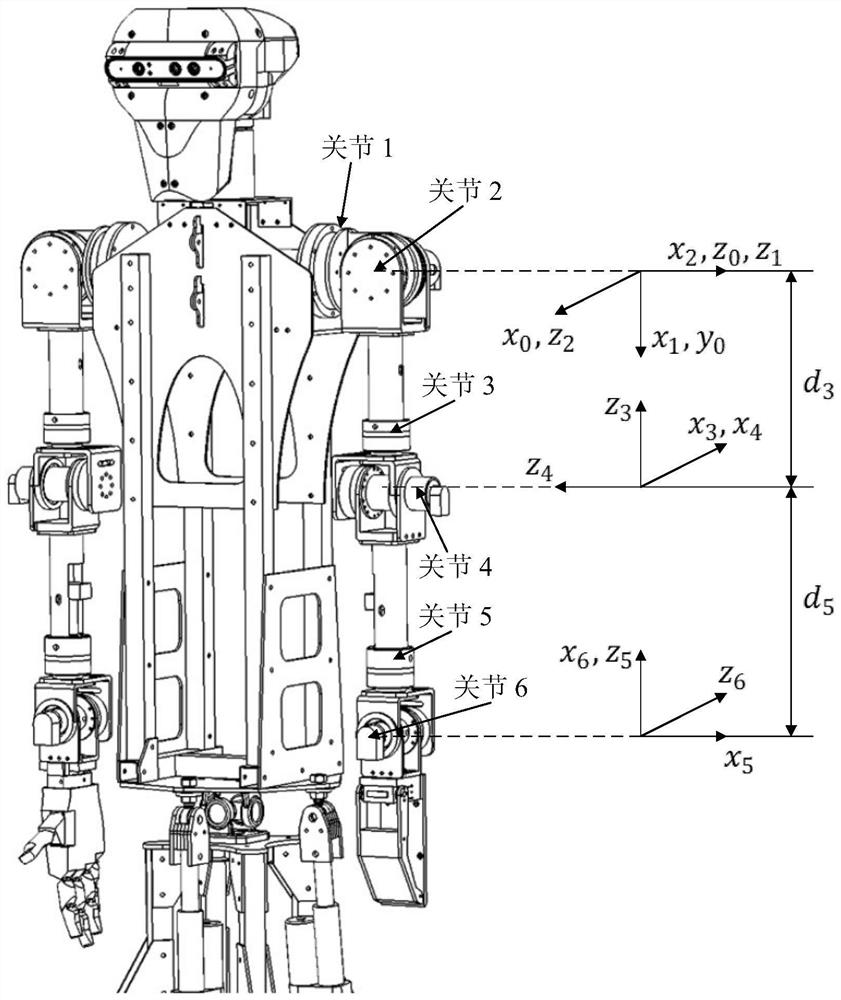
[0076] Step 1: According to the D-H parameter method, establish the link coordinate system {i} of the joint i of the six-DOF wrist offset serial manipulator, where i=1, 2, 3, 4, 5, 6.
[0077] In this embodiment, the schematic diagram of the established D-H coordinate system of the manipulator is as follows figure 2 As shown, the transformation between the coordinate system {i} and the coordinate system {i-1} consists of four parameters, as shown in t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More