

Ten-degrees-of-freedom double-mechanical-arm structure of old-age care robot
A technology with dual manipulators and degrees of freedom, applied in manipulators, program-controlled manipulators, joints, etc., can solve problems such as unreasonable structural design, complex manipulator operations, and inability to achieve heavy loads, and achieve a reasonable and compact overall structure and diverse functions. The effect of sizing and arm span is suitable
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
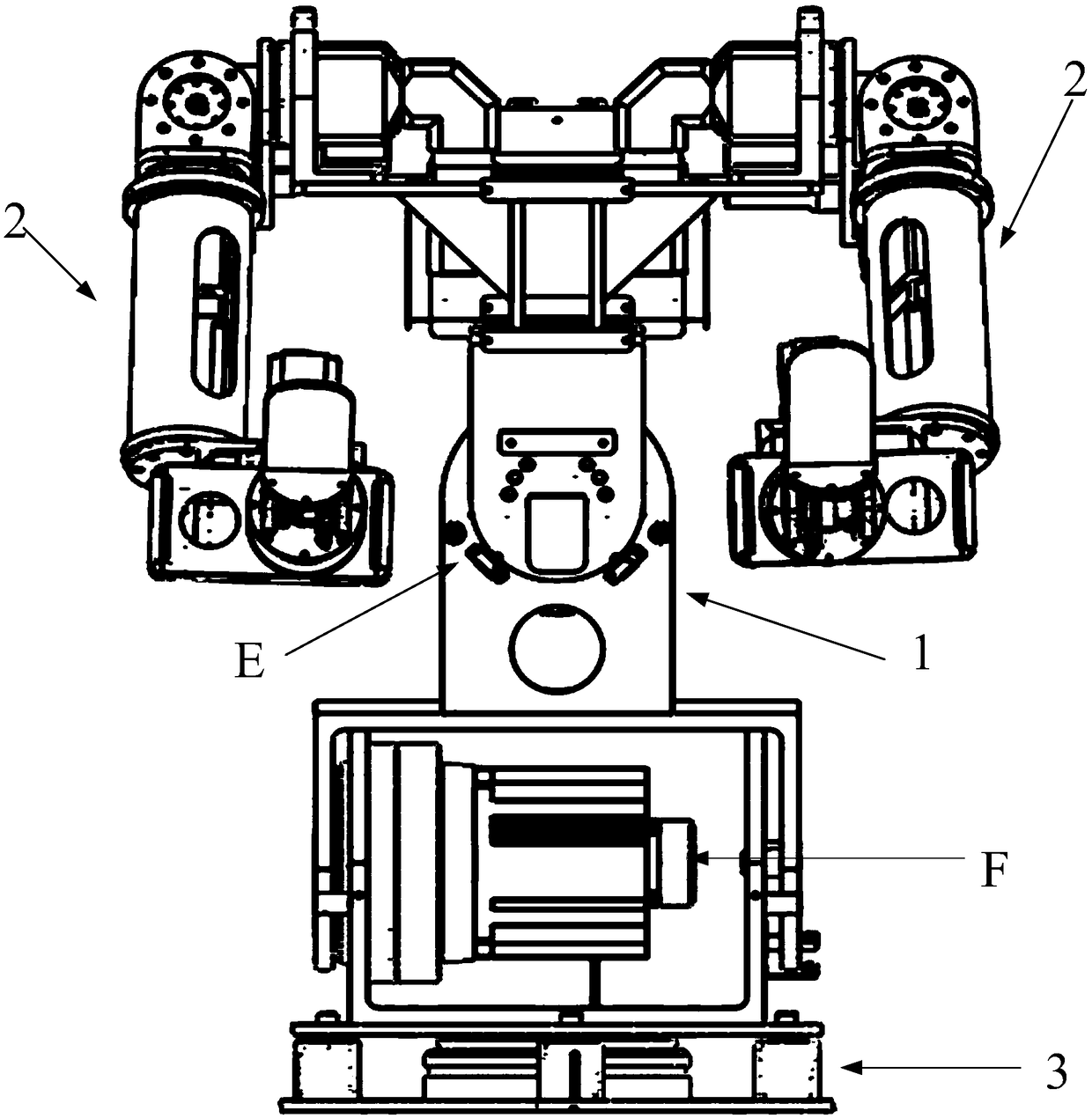
[0019] The present invention provides a ten-degree-of-freedom dual mechanical arm structure of an elderly care robot, such as figure 1 As shown, the elderly care robot is composed of a robot main body 1, two single mechanical arms 2 connected to the robot main body, and an omnidirectional wheel mobile platform 3 connected to the bottom of the robot main body 1 . The two single manipulators 2 form a ten-degree-of-freedom double manipulator structure. The two single robotic arms 2 are identical in structure, and are located symmetrically on the left and right sides of the upper end of the robot body 1. Each single robotic arm 2 has five degrees of freedom, so the dual robotic arms have ten degrees of freedom.
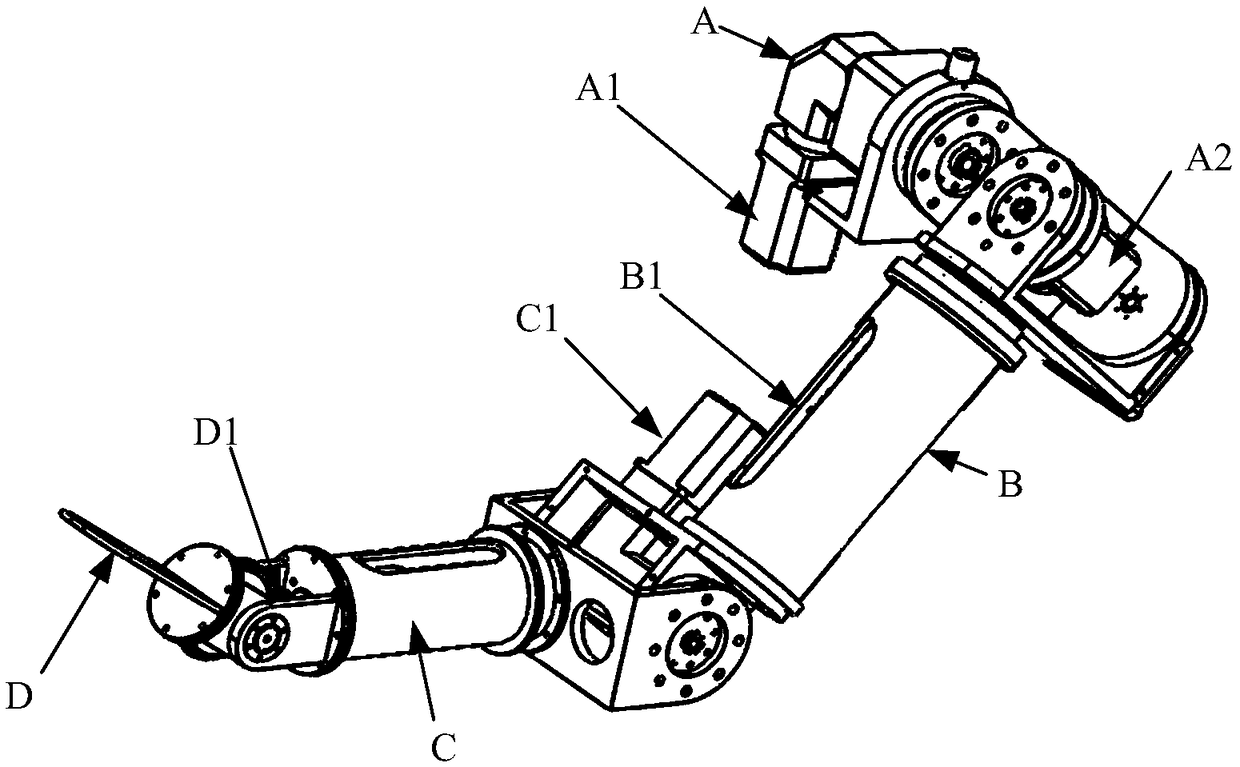
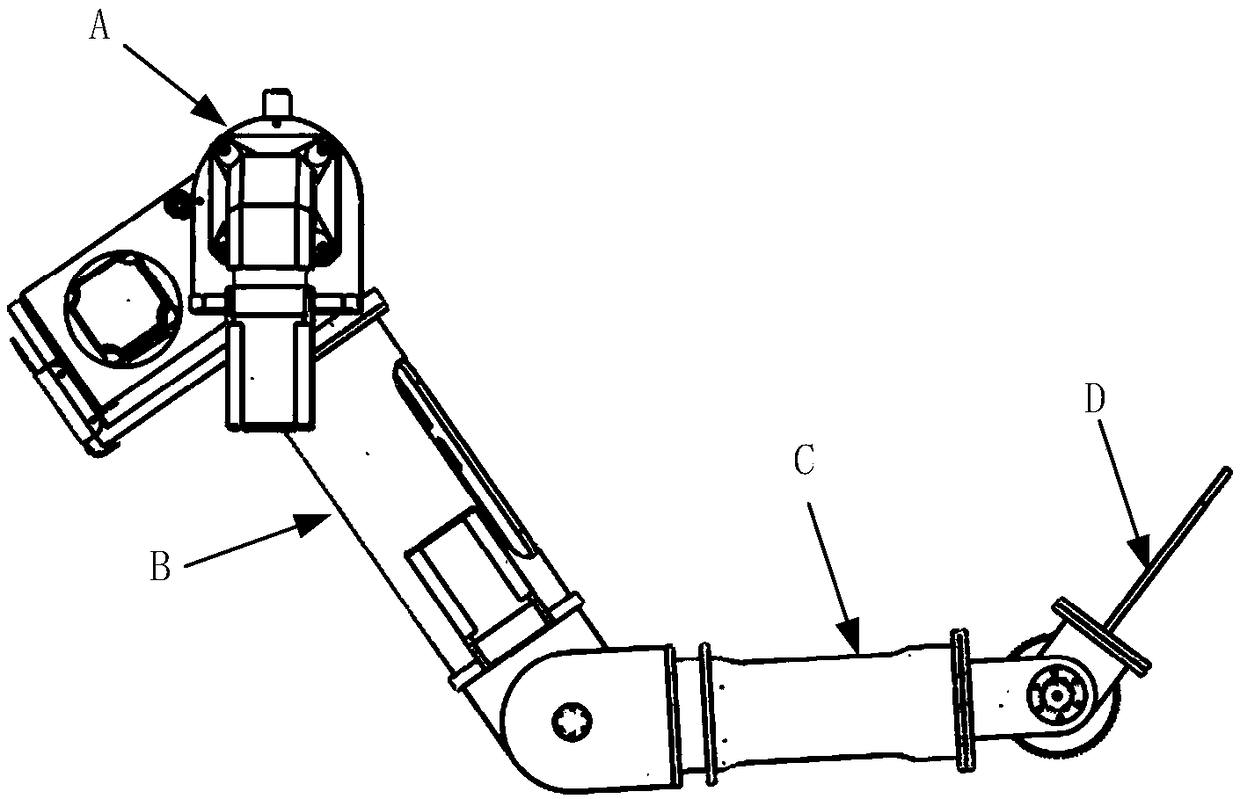
[0020] like Figure 2-4 As shown, the single mechanical arm 2 includes a shoulder A, a large arm B, a small arm C and a manipulator D, one end o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More