

Bionic sea cockroach leg structure with cushioning function
A sea cockroach and functional technology, applied in the field of bionic robots, can solve the problems of lack of impact resistance, poor adaptability to road conditions, complex robots, etc., and achieve the effects of strong adaptability to structural road conditions, high space utilization, and wide application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0034] A bionic sea cockroach leg structure with cushioning function.
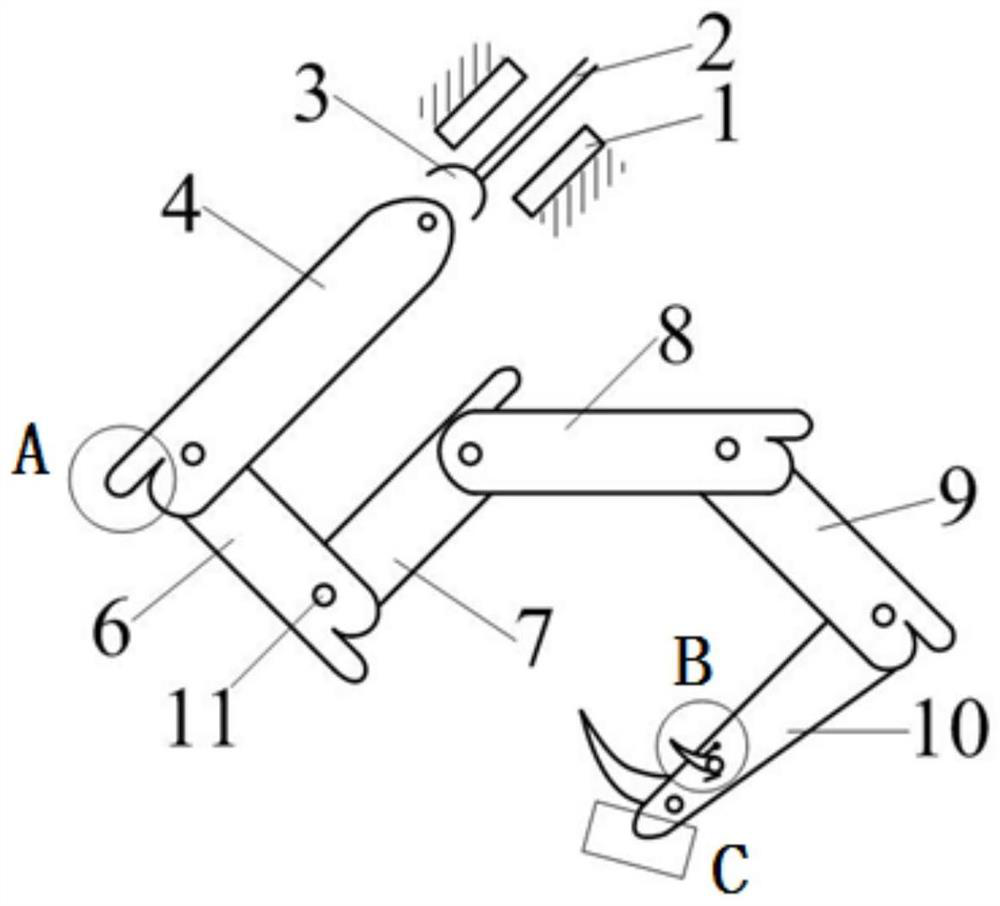
[0035] Refer to attached figure 1 , the bionic sea cockroach leg structure includes a power source connection device, six bionic limbs connected in sequence and a claw 15 arranged on the sixth limb 10, wherein the power source connection device is used to connect the robot power source and the bionic limb Joint connection, which includes a limit block 1, a power output rod 2 and a ball hinge 3, the limit block 1 is installed on the robot, and the gap between the two limit blocks 1 is adjustable, and one end of the power output rod 2 is connected to the power source of the robot , the other end is fixed on a ball hinge 3, and the ball hinge 3 is installed on the top of the first limb 4.
[0036] The first limb segment 4 is connected to the power output rod 2, and the adjacent bionic limb segments are flexibly connected through the connecting piece 11, and a corner limiting structure and a buffer structure ...
Embodiment 2
[0045] Robot with bionic sea cockroach leg structure with cushioning function.
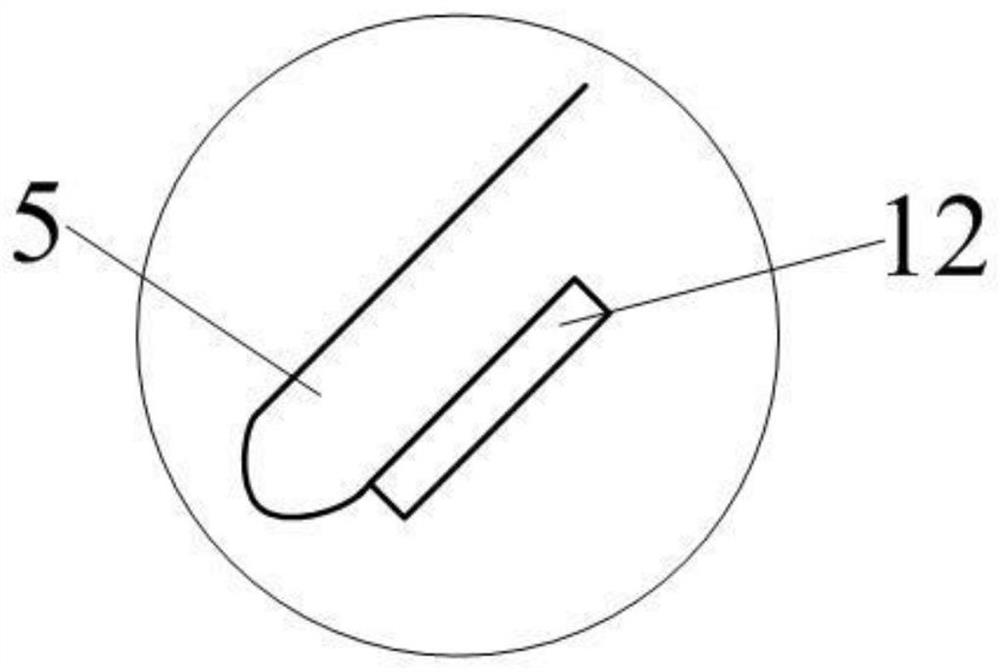
[0046] When the robot is moving normally, the claw 15 or the buffer pad 12 at the end of the sixth limb 10 is selected to contact the road surface according to the road conditions.
[0047] When the robot advances or adjusts the posture of the legs, impacts will occur between the bionic limbs of the legs, and the buffer pad 12 installed on the corner limit block 5 plays a buffering role.
[0048] When the robot jumps off from a certain height, adjust the posture of the legs and retract the claws 15 to land with the buffer pad 12 at the end of the sixth limb 10 .
[0049]When the robot crawls in an environment with limited space, the first limb section 4, the second limb section 6 and the third limb section 7 are stowed to save space.
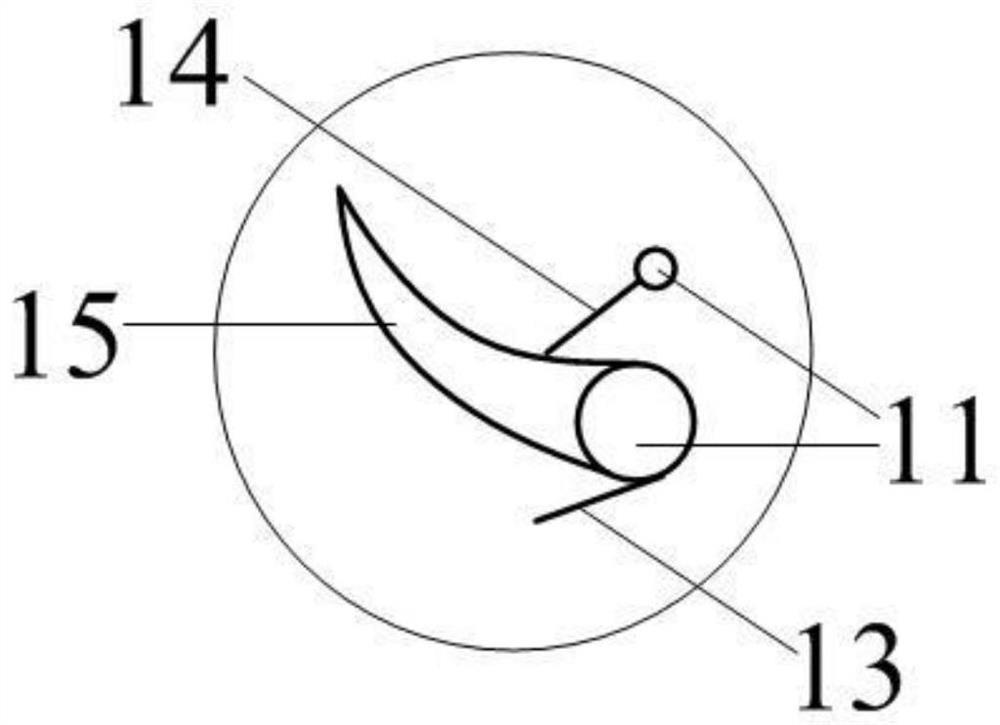
[0050] When the robot climbs, adjust the suitable claw 15 rotation angle in real time according to demand, and lock the claw 15 with the claw locking bar 14 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More