

Automatic production robot for power busway
A technology for automatic production and busway, applied in metal processing equipment, feeding device, positioning device, etc., can solve the complicated bending operation of busway side plate, inaccurate measurement of busway side plate, unstable manual bending, etc. Problems, to achieve high work efficiency, low labor intensity, and improve stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
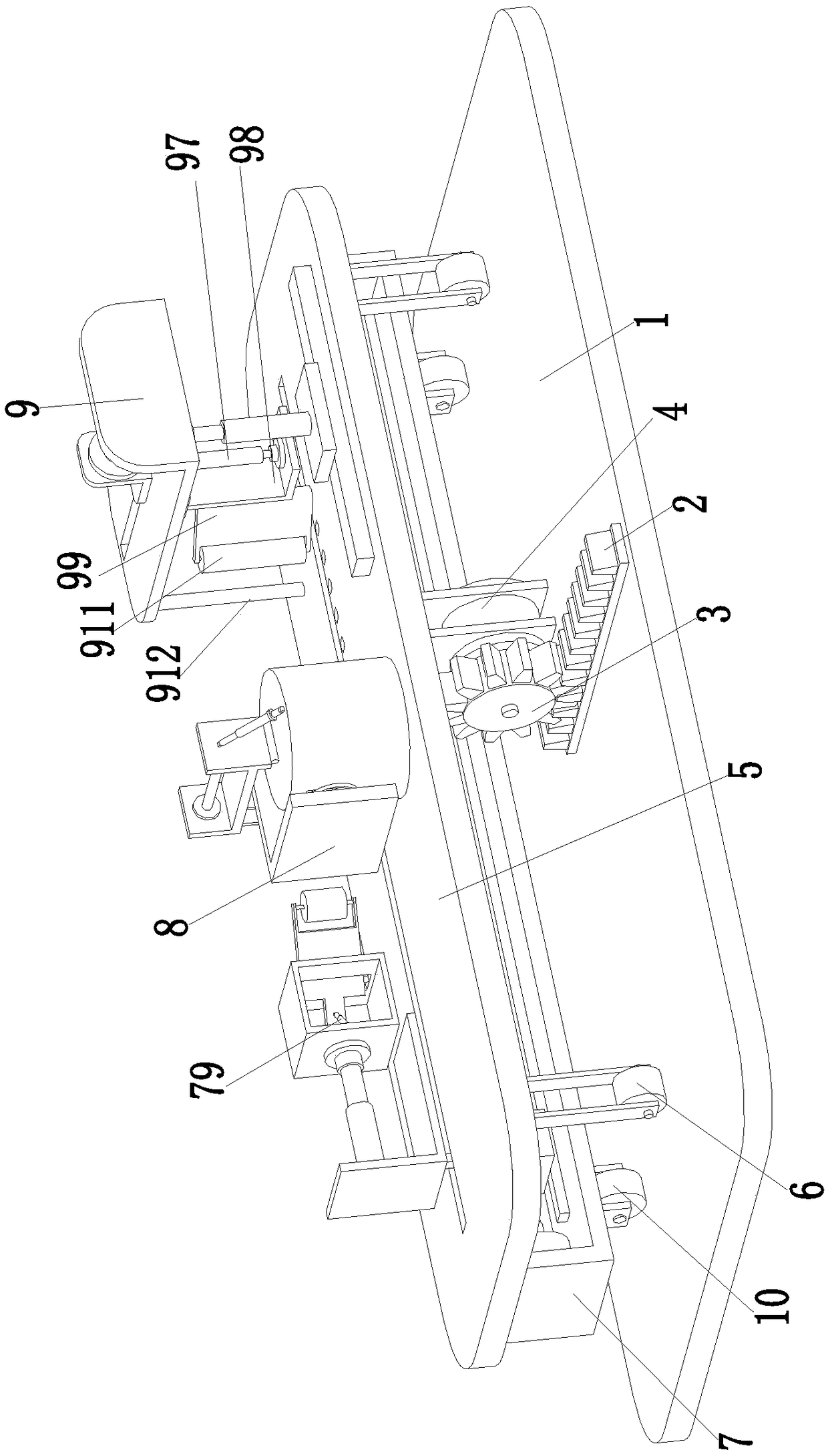
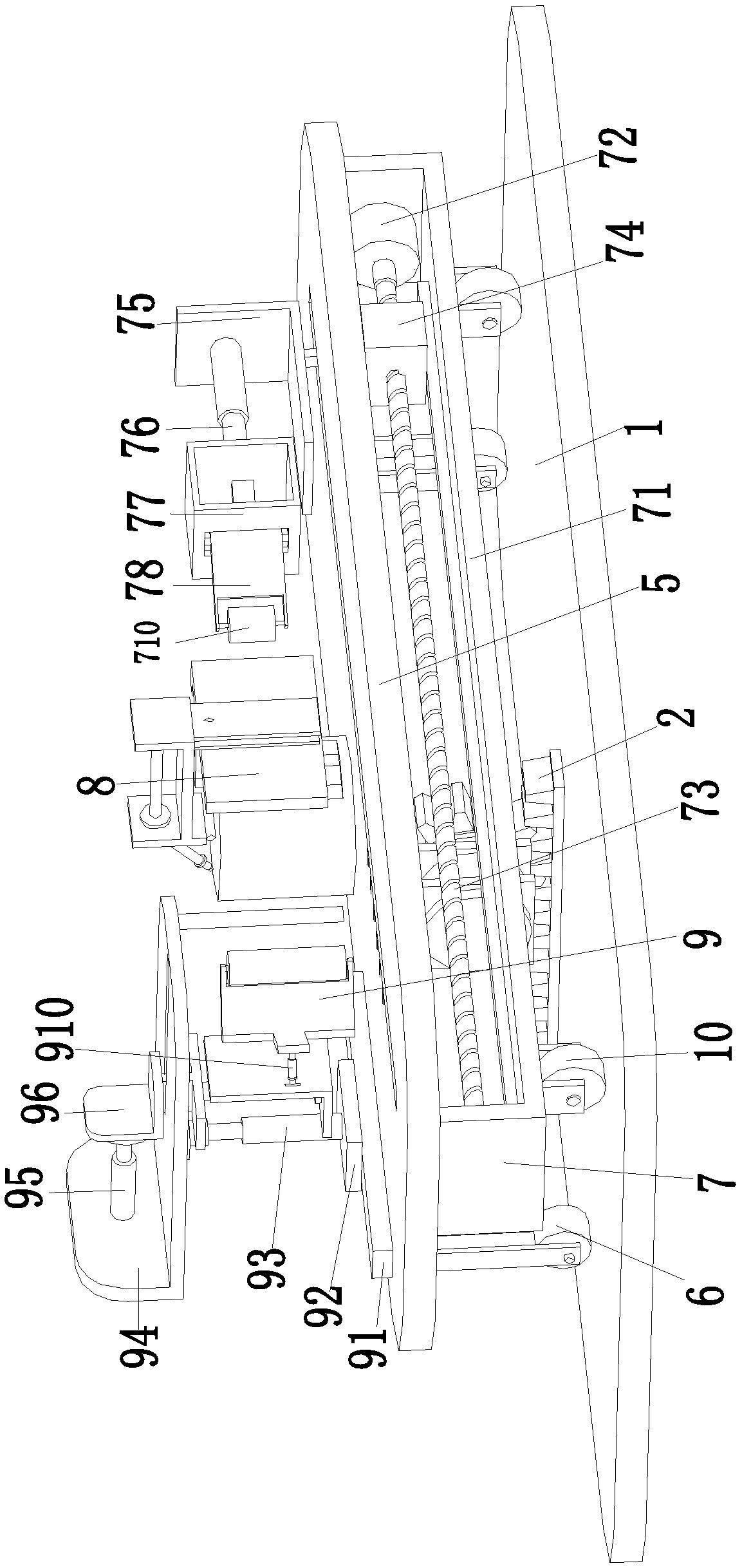
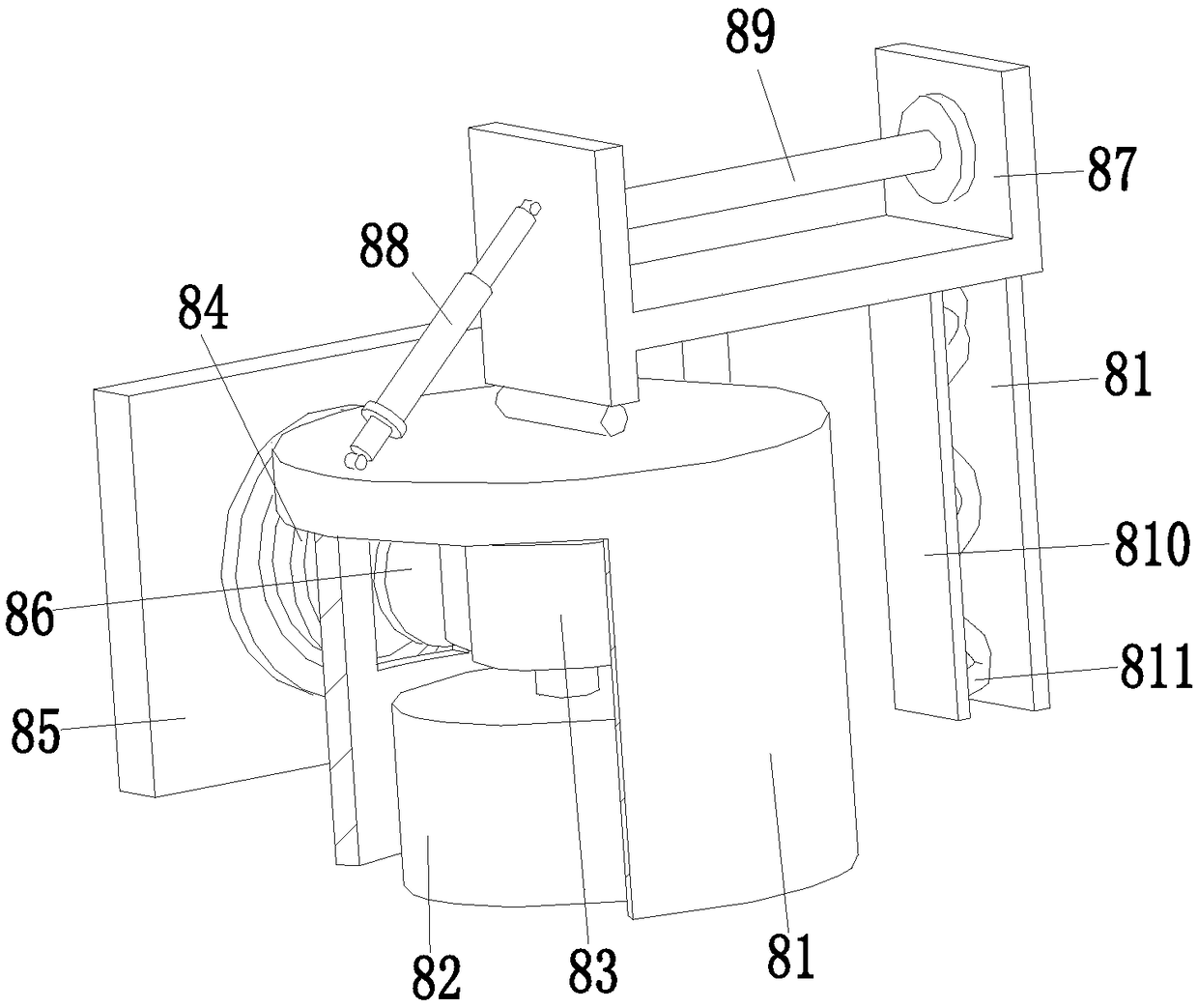
[0018] Such as Figure 1 to Figure 3As shown, a robot for automatic production of power bus ducts includes a bottom plate 1, on which a moving rack 2 is mounted, on which the moving rack 2 is meshed with a moving gear 3, and the moving gear 3 is installed on the output shaft of the moving motor 4, The mobile motor 4 is installed on the mounting plate 5 through the motor base, and the lower side of the front end of the mounting plate 5 is provided with two No. 1 auxiliary wheels 6, and the two No. 1 auxiliary wheels 6 are symmetrically located on the left and right sides of the mounting plate 5, and the mounting plate 5 The rear side of the body is provided with an adjusting moving groove, and an adjusting bending device 7 is arranged in the adju...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More