Angle adjustable type bionic hair sensing structure
A bionic hair and hair technology, applied in force/torque/work measuring instruments, instruments, measuring force, etc., can solve the problem of difficulty in obtaining more dimensional information, and achieve the effect of sensitive deformation detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
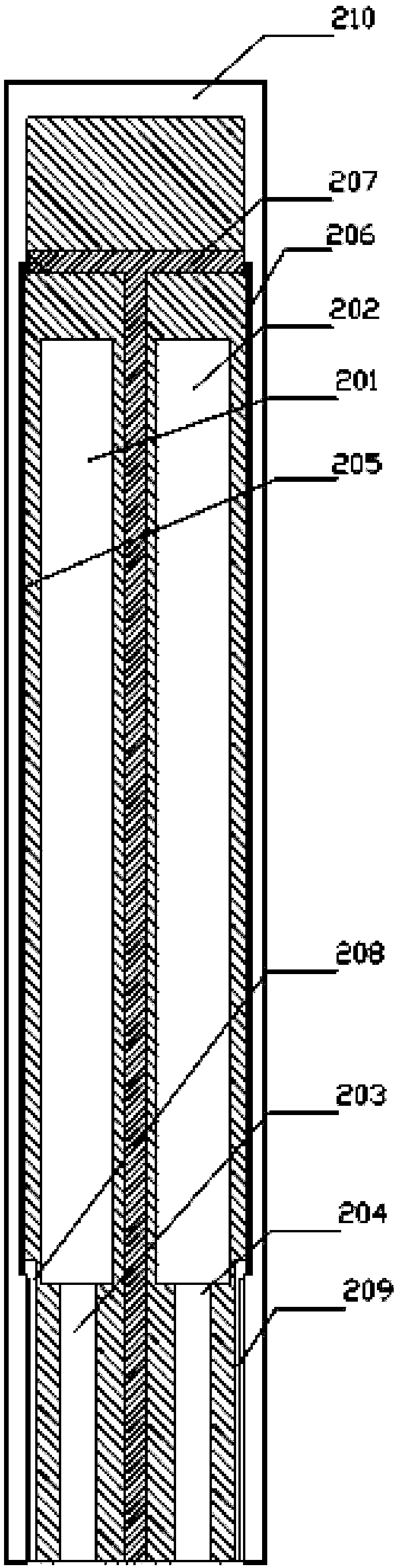
[0057] When the surface of the detection area is a plane and obtains an external force in the horizontal direction, adjust the air pressure so that the air pressure in the first air cavity 201 and the second air cavity 202 of the hair receptor 2 are equal, so that the hair receptor 2 does not move before the external force is applied. Bending occurs.
[0058] When an external force in the horizontal direction acts on the hair receptor 2, the hair receptor 2 will bend. The bending deformation will cause the first flexible sensing layer 205 and the second flexible sensing layer 206 to shrink and extend. Therefore, the resistance values of the first flexible sensing layer 205 and the second flexible sensing layer 206 will change, one increases and the other decreases. The potential of the contact end between the power signal transmission wire 207 and the first flexible sensing layer 205 and the second flexible sensing layer 206 is high level, so the output voltage of the first...
Embodiment 2
[0060] When the surface of the detection area is a plane and the external force in a non-horizontal direction is obtained, the air pressure in the first air cavity 201 and the second air cavity 202 of the hair receptor 2 is adjusted so that the hair receptor 2 bends before the external force is applied, The direction of bending is to make the external force perpendicular to the top of the hair receptor 2, such as Figure 6 As shown, F in the figure represents the acting external force. The bending deformation at this time will cause the first flexible sensing layer 205 and the second flexible sensing layer 206 to shrink and stretch, so the resistance values of the first flexible sensing layer 205 and the second flexible sensing layer 206 change. The resistance value can be calculated according to the output voltages of the first signal transmission wire 208 and the second signal transmission wire 209 , and the corresponding resistance difference is recorded as the initial si...
Embodiment 3
[0063] In the process where the surface of the detection area is plane and multiple external forces in different directions are obtained, the air pressure in the first air cavity 201 and the second air cavity 202 of the hair receptor 2 is adjusted so that the hair receptor 2 generates Bending, the direction of bending is to make each external force perpendicular to the top of the hair receptor 2 corresponding to detect the external force. The bending deformation at this time will cause the first flexible sensing layer 205 and the second flexible sensing layer 206 to shrink and extend, so the resistance values of the first flexible sensing layer 205 and the second flexible sensing layer 206 change, according to The magnitude of the output voltage of the first signal transmission wire 208 and the second signal transmission wire 209 can calculate the magnitude of the resistance value, and record the corresponding resistance value difference as the initial situation.
[0064] Wh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



