

Method and device for estimating angle and angular velocity of holder motor, holder, and aircraft
An angular velocity and angle technology, applied in the direction of electric speed/acceleration control, etc., can solve the problems of inability to obtain accurate motor angular velocity, single data type, and inability to obtain accurate angular velocity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
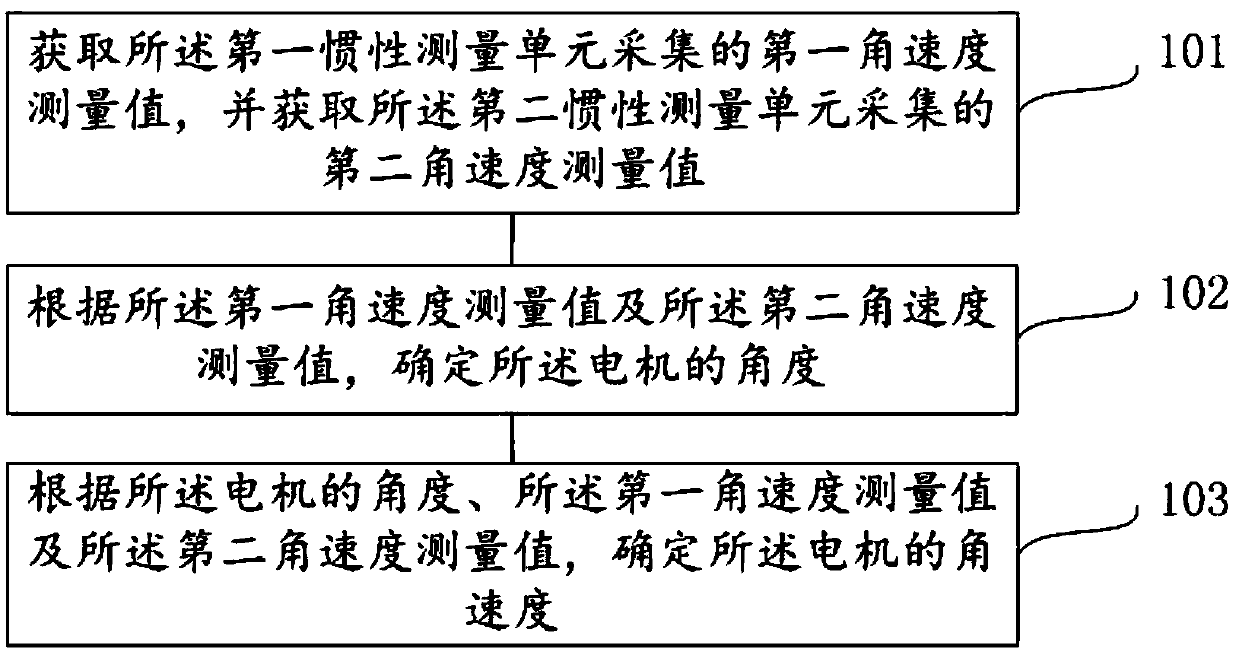
[0098] figure 1 It is a schematic flowchart of a method for estimating the angle and angular velocity of a pan-tilt motor provided by an embodiment of the present invention. Wherein, the method for estimating the angle and angular velocity of the pan-tilt motor can be executed by various controllers with certain logic processing capabilities, such as pan-tilt controllers. The pan-tilt controller can be applied to an aircraft, for example, an unmanned aerial vehicle. In the following, the controller implementing the gimbal motor angle and angular velocity estimation method will be described using the gimbal controller as an example, and the aircraft as an unmanned aerial vehicle. Among them, the UAV includes a camera component. The camera component includes a pan-tilt and a shooting device mounted on the pan-tilt. The pan-tilt includes a base, a motor, a pan-tilt controller and an electric regulator. The ESC is electrically connected to the motor, and the ESC is used to contr...
Embodiment 2
[0152] Figure 5It is a schematic diagram of a pan-tilt motor angle and angular velocity estimation device provided by an embodiment of the present invention. Wherein, the pan-tilt motor angle and angular velocity estimating device 50 can be configured in various controllers with certain logic processing capabilities, such as pan-tilt controllers. The pan-tilt controller can be applied to an aircraft, for example, an unmanned aerial vehicle. In the following, the gimbal motor angle and angular velocity estimating device 50 is configured in the gimbal controller as an example, and the aircraft is an unmanned aerial vehicle as an example for illustration. Among them, the UAV includes a camera component. The camera component includes a pan-tilt and a shooting device mounted on the pan-tilt. The pan-tilt includes a base, a motor, a pan-tilt controller and an electric regulator. The ESC is electrically connected to the motor, and the ESC is used to control the motor. Moreover, t...
Embodiment 3
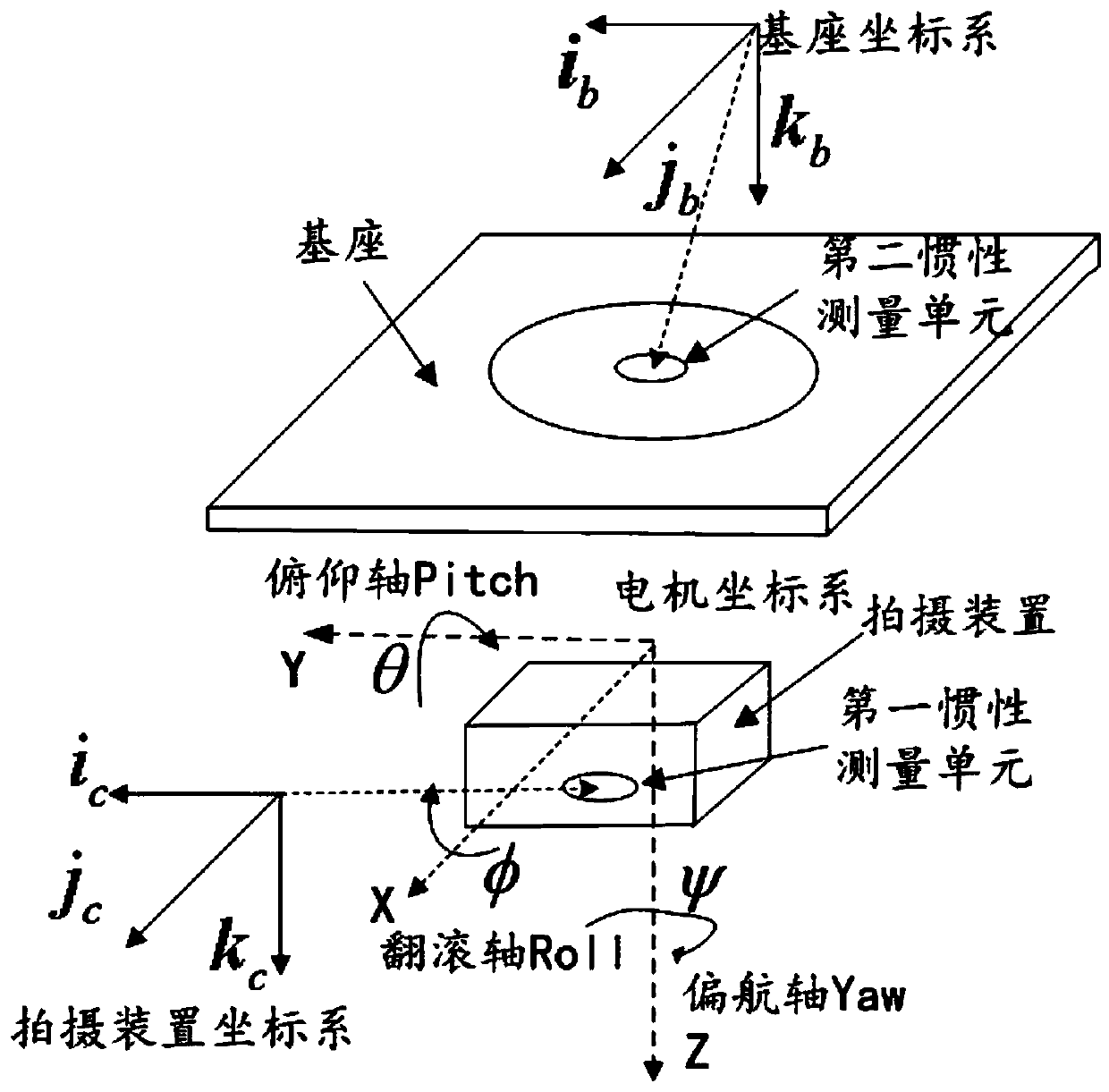
[0200] Image 6 A cloud platform provided by an embodiment of the present invention. Described cloud platform 60 is used for carrying photographing device, and described cloud platform 60 comprises: base 601 and motor 602, described photographing device and described base 601 are connected through described motor 602, and described photographing device is provided with the first An inertial measurement unit, the base 601 is provided with a second inertial measurement unit.
[0201] The cloud platform 60 further includes: at least one processor 603 and a memory 604 communicatively connected with the at least one processor 603 . Wherein, at least one processor 603 is connected with the motor 602 . Figure 7 A processor 603 is taken as an example.
[0202] The processor 603 and the memory 604 may be connected via a bus or in other ways, Figure 7 Take connection via bus as an example.
[0203] The memory 604, as a non-volatile computer-readable storage medium, can be used to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More