

obstacle climbing robot
A robot and pole-climbing technology, which is applied in the field of mobile robots, can solve the problem that the moving speed and obstacle-breaking function cannot be taken into account, and achieve the effect of increasing the space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
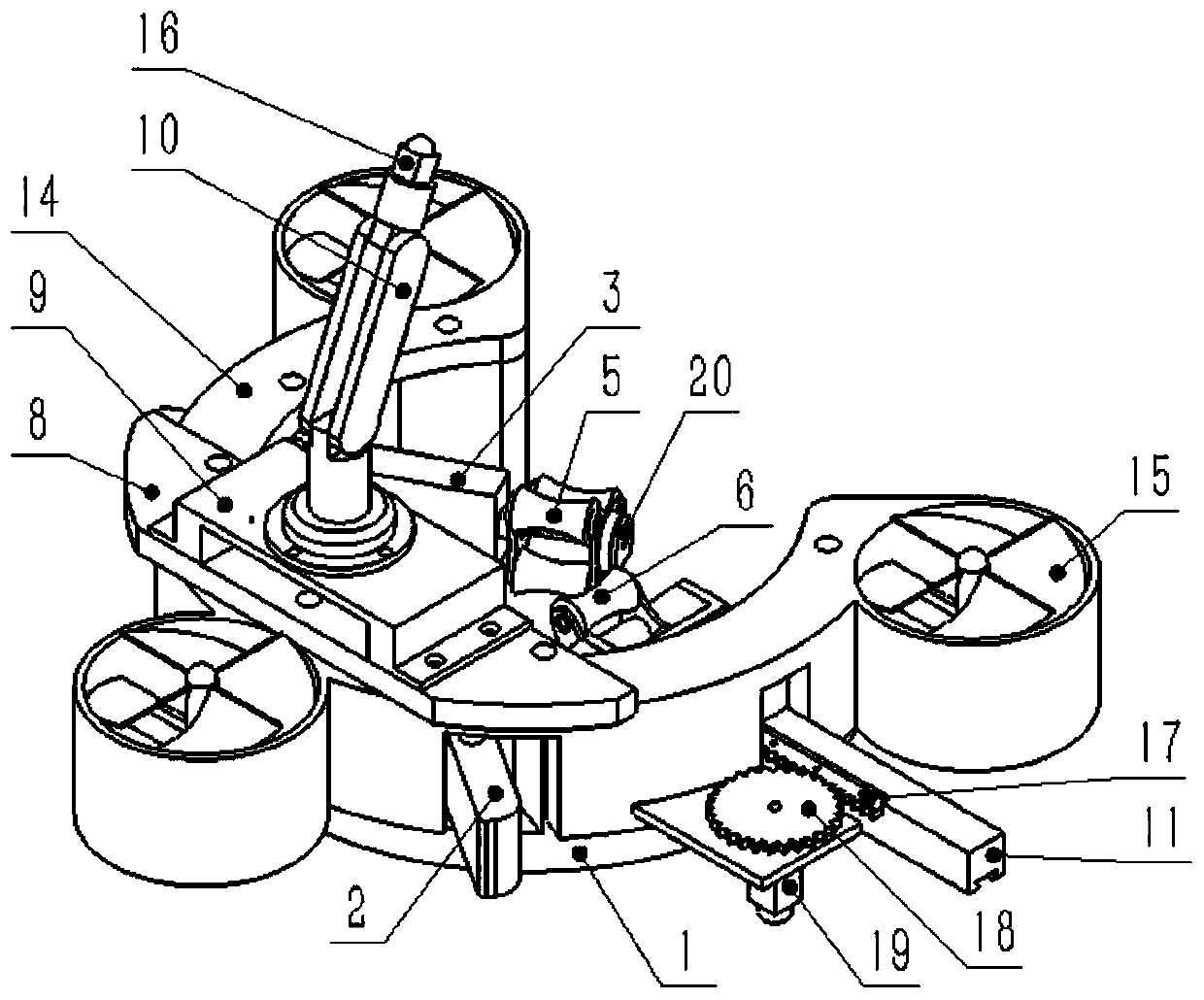
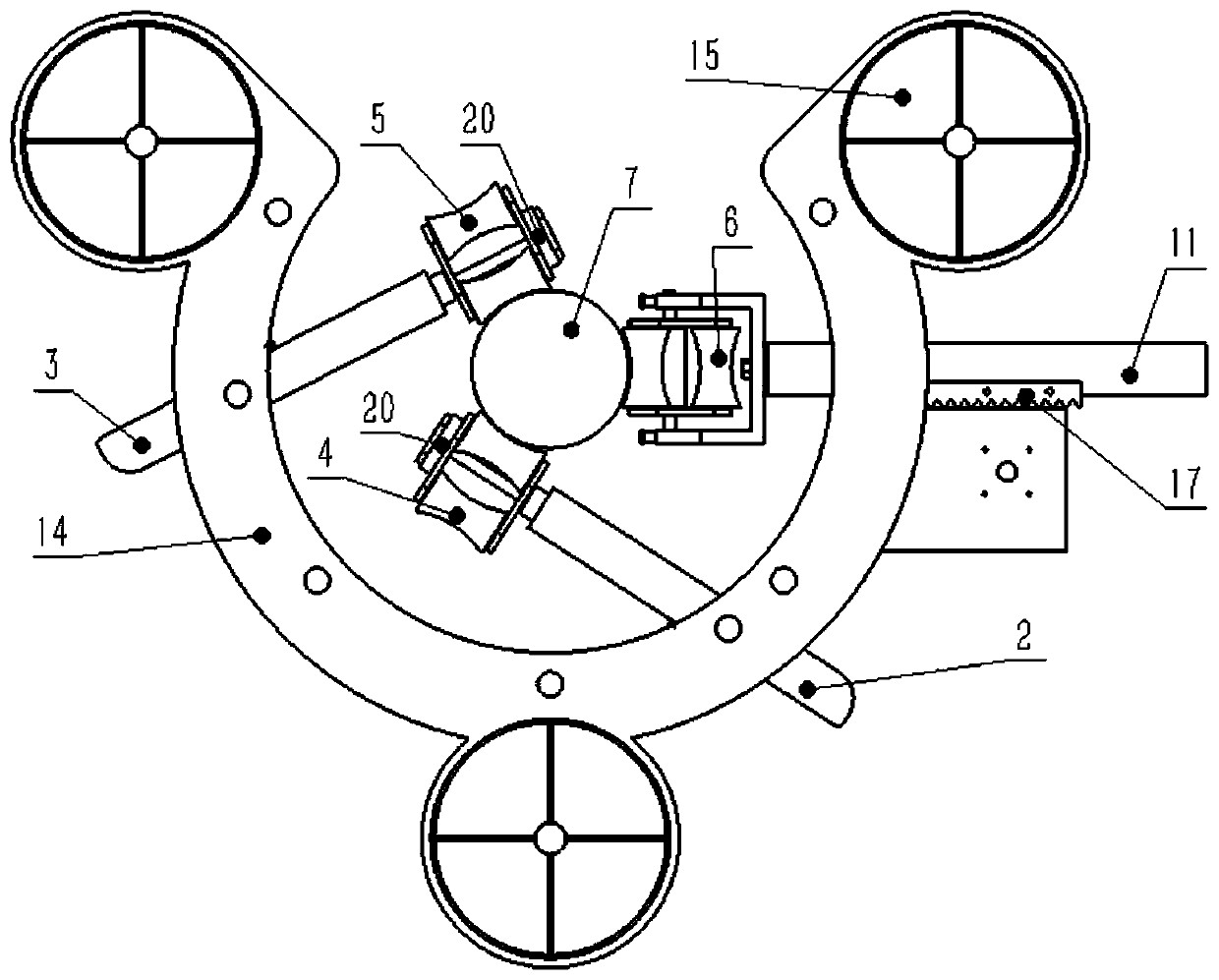
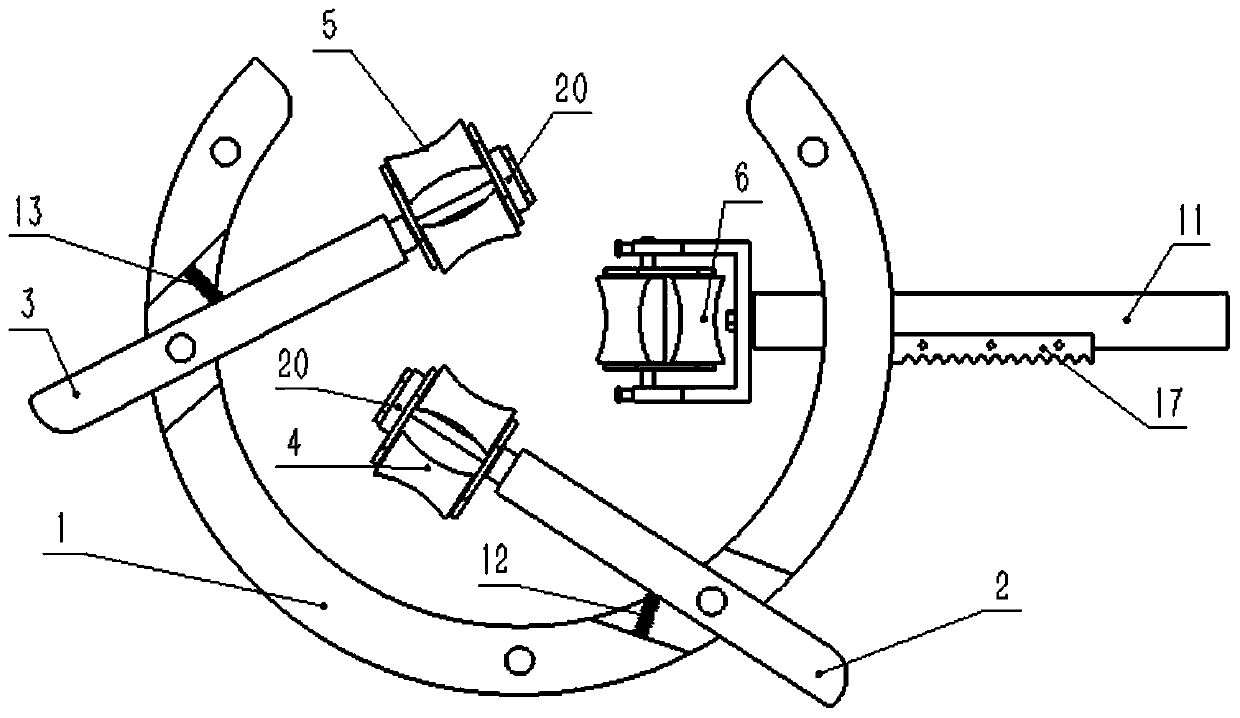
[0033] see figure 1 , the obstacle-climbing robot in the illustration is a preferred solution of the present invention, specifically including a fixed base 1, a first swing rod 2, a second swing rod 3, a first obstacle-crossing wheel assembly 4, a second obstacle-crossing The wheel assembly 5, the third obstacle-crossing wheel assembly 6, the platform connecting plate 8, the platform base plate 9, the multi-degree-of-freedom platform 10, the telescoping rod 11, the fan assembly 15 and the actuator 16. The fixed base 1 is the body of the pole-climbing robot. The first obstacle-crossing wheel assembly 4, the second obstacle-crossing wheel assembly 5 and the third obstacle-crossing wheel assembly 6 pass through the first swing rod 2, the second swing rod 3 and the telescopic rod respectively. 11 is set on the fixed base 1 to guide and clamp the climbing target pole, and at the same time realize the overturning of obstacles on the target pole. The fan assembly 15 is connected to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More