Finite-time fault-tolerant control method for adaptive multivariable quadrotor UAV
A four-rotor unmanned aerial vehicle, limited time technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the inconvenience of UAV controller implementation, UAV external interference and the boundary of failure rate Accurate and difficult to obtain and other problems, to achieve fast convergence and stable tracking flight, enhance system safety and reliability, and improve control performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
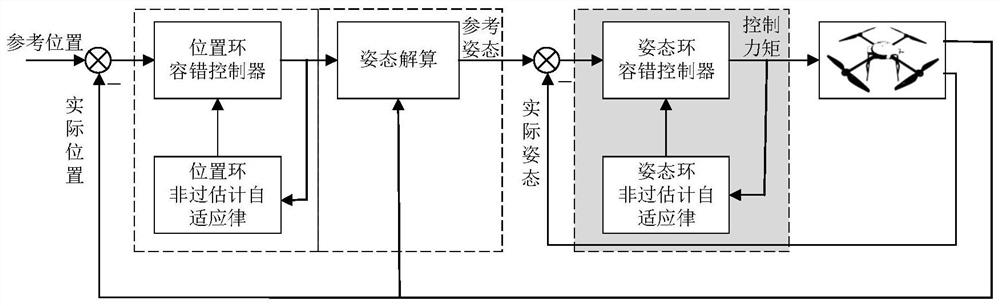
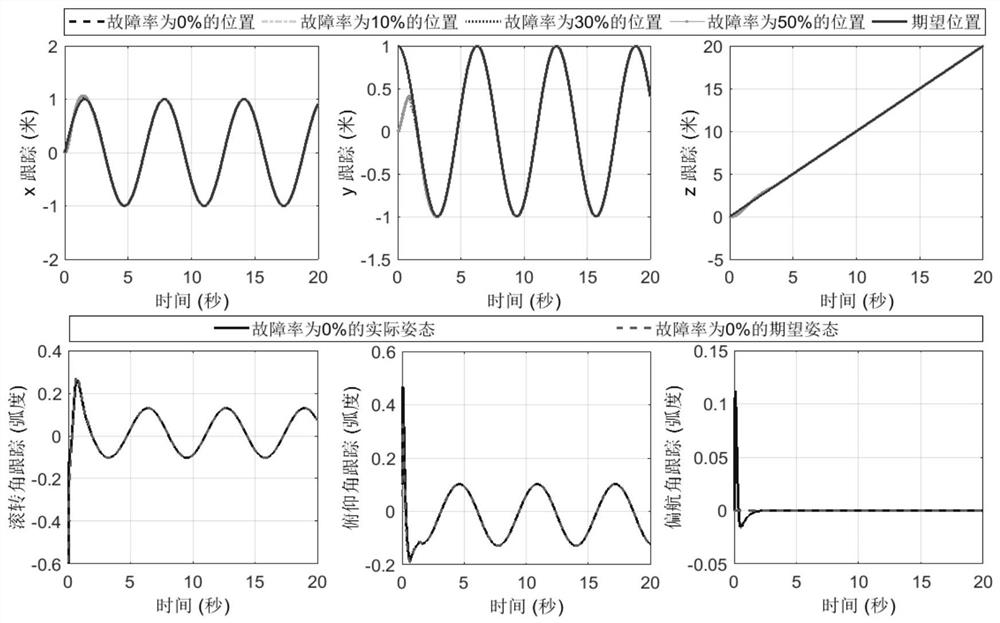
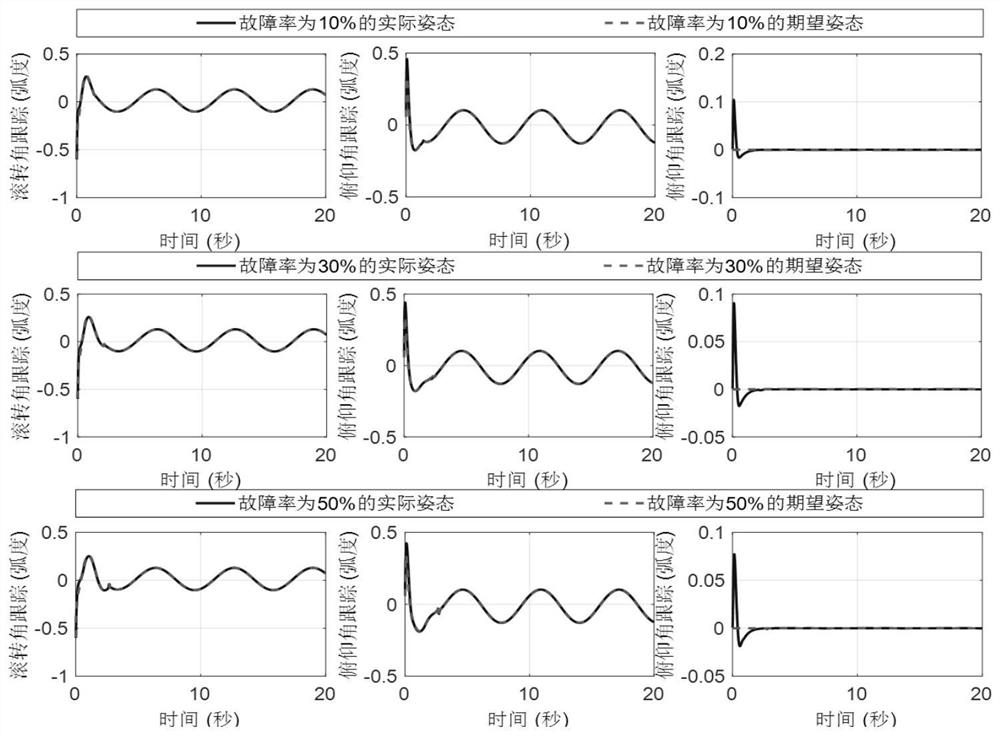
[0063] It is an object of the present invention to propose an adaptive finite time fault tolerance control method for use in a four-rotorless drone. Specifically, considering the urgent needs of safe and stable and reliable flight in the complex flight environment of the drone, it is proposed a limited time tolerance based on adaptive multivariate-based unmantening-based uninpoint in comprehensively considering the impact of the rotor failure and interference border. Control method, this method has broken through the shortage of traditional control algorithms and estimated adaptive fault tolerance, first proposed adaptive finite time fault tolerance control method with non-estimated characteristics, solving the four-rotorless drone in the rotor failure and interfering border unknown High-precision rapidly and stabilized tracking control problems under influence, thereby achieving the purpose of improving the control performance of four rotorless drones, enhancing system security a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More