

Partly-observable automatic pilot decision-making method and system based on restraint online planning
A technology of automatic driving and decision-making method, which is applied in the direction of control/regulation system, non-electric variable control, two-dimensional position/course control, etc. It can solve the problems of only passively accepting the driving plan and single driving mode, so as to reduce excessive Effects of dependence, solving computational difficulties, increasing feasibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
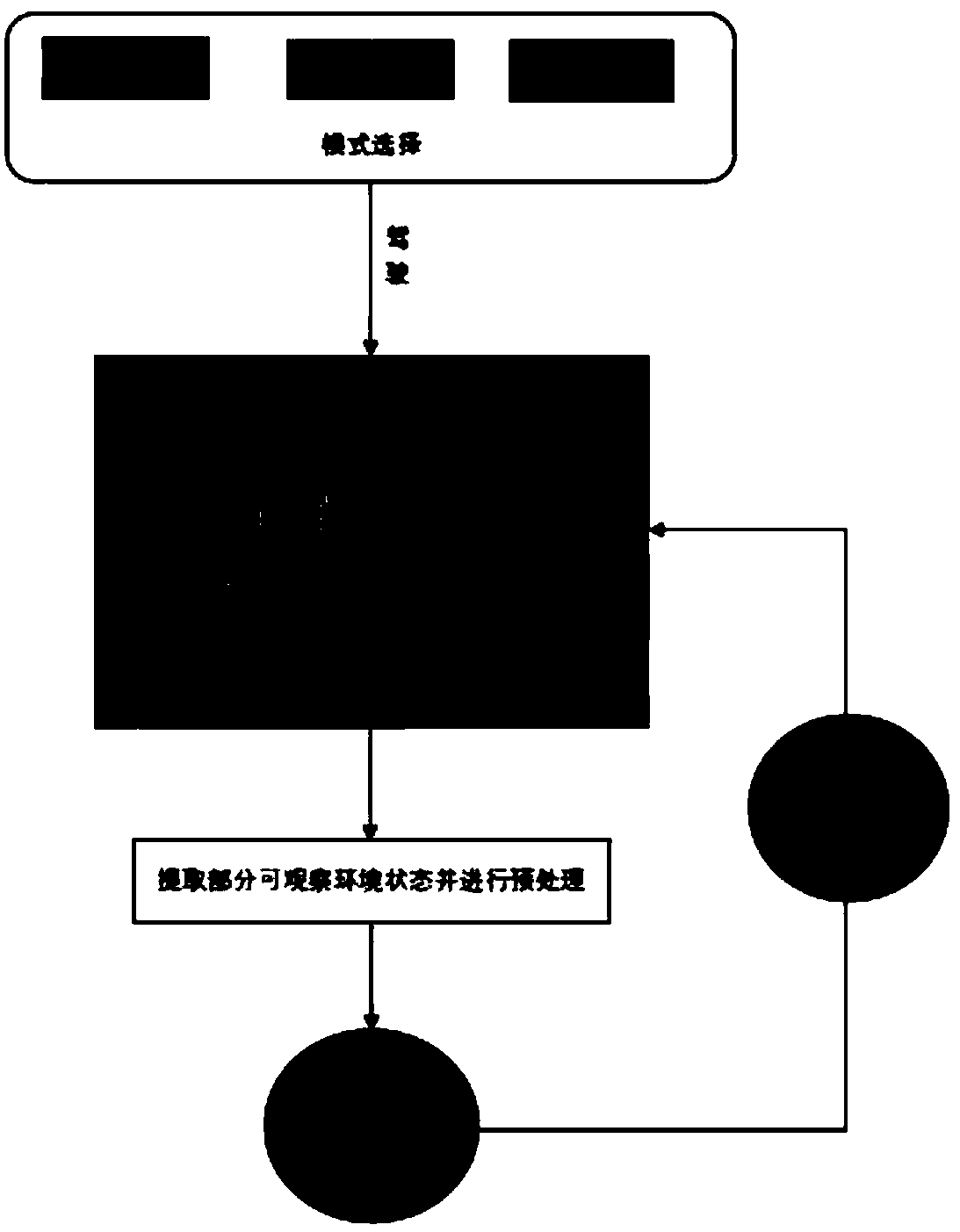
[0051] refer to Figure 1 to Figure 3 , a decision-making method for partially observable autonomous driving based on constrained online programming, including:
[0052] Receive the driving mode selected by the user;
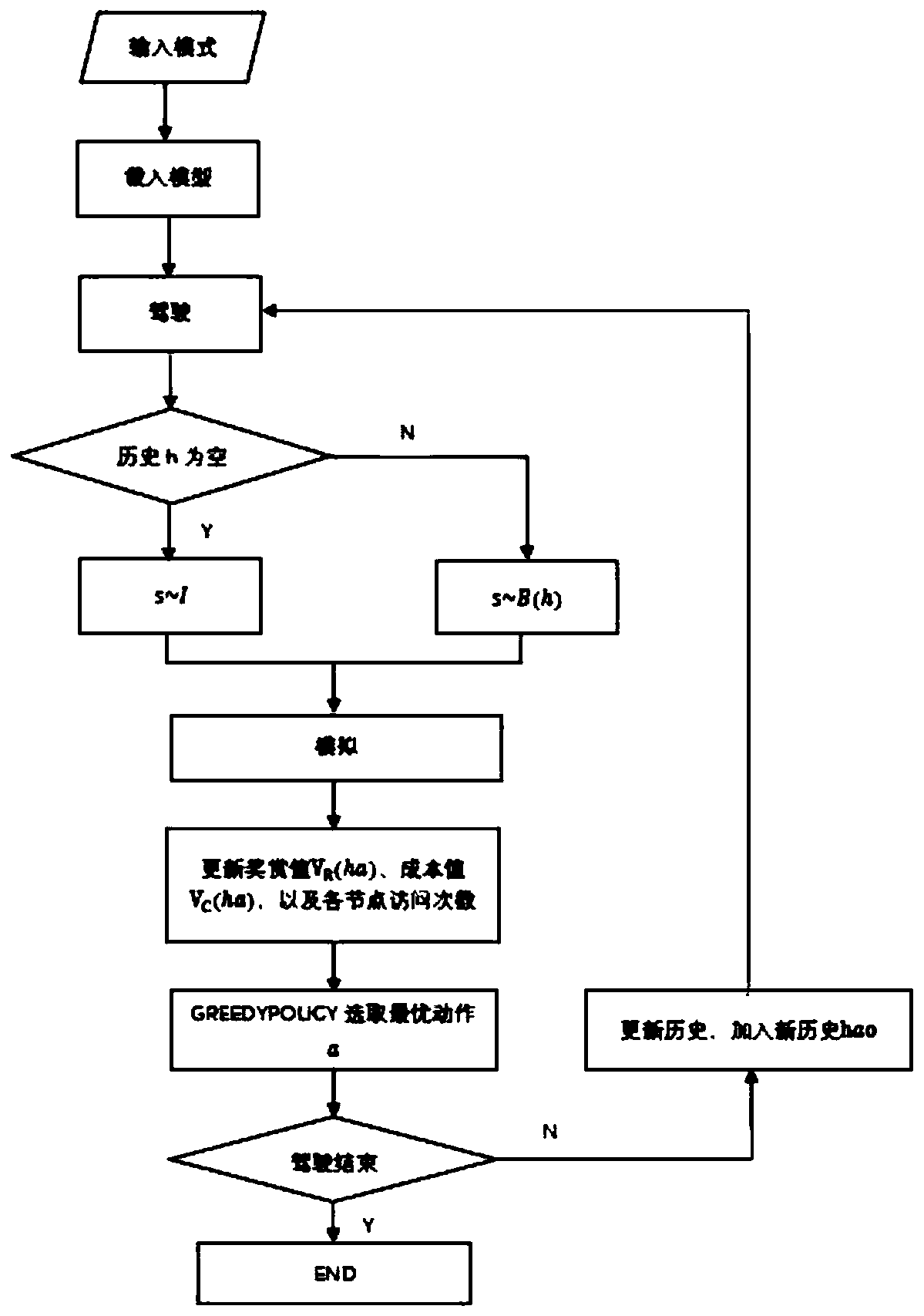
[0053] According to the driving mode selected by the user to plan the driving plan, the planning decision-making process is as follows:
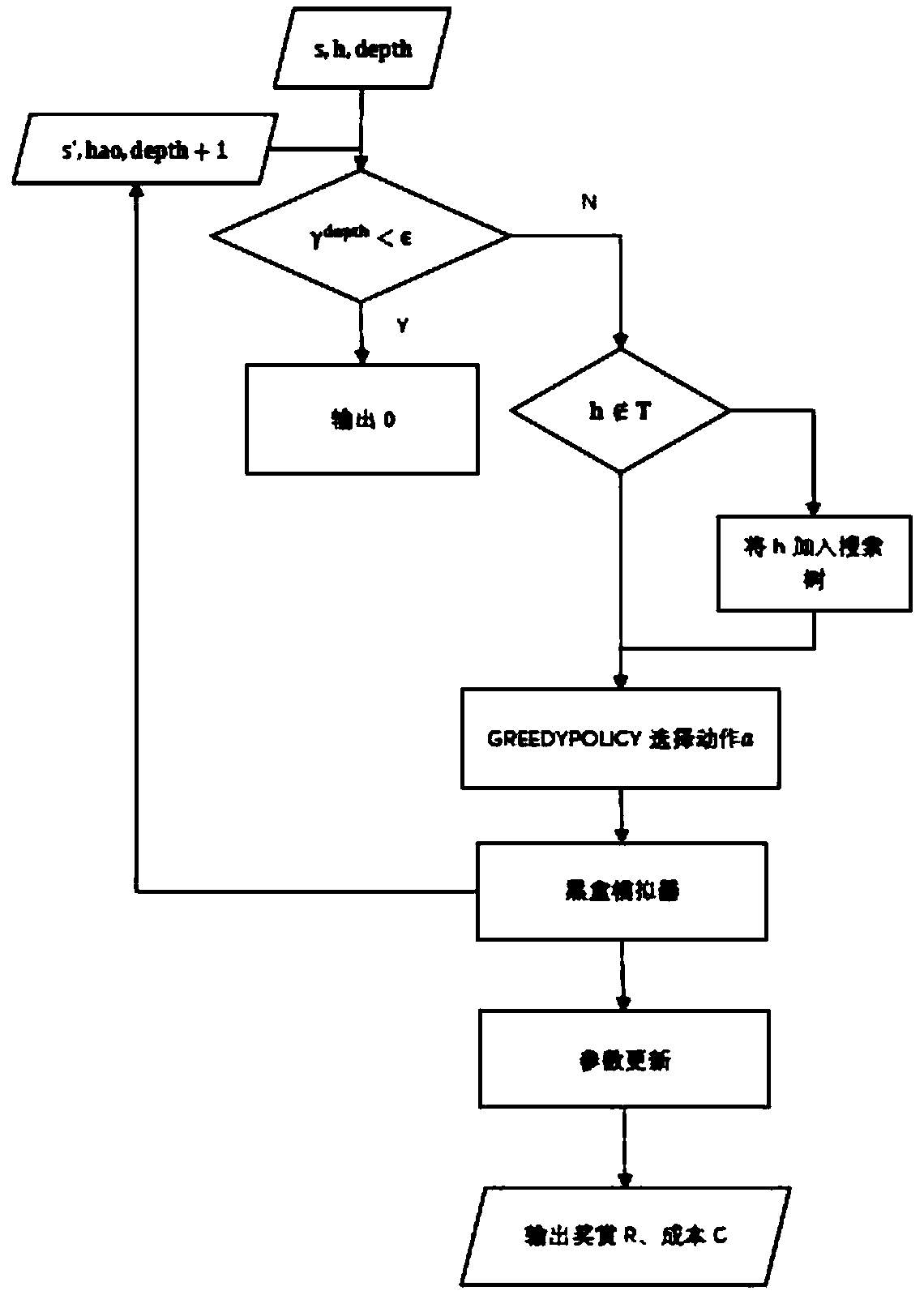
[0054] Select the initial state s of the simulation planning from the belief state B(h) of the given initial state distribution I or history h to construct a Monte Carlo search tree for simulation planning:
[0055] According to the cost-cons...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More