

Moving-target adaptive direction-finding, positioning and tracking method based on multi-star collaboration
A technology of direction finding and positioning and moving targets, which is applied in the field of space-based moving target tracking, can solve the problems of loss of positioning accuracy and reduction of computing efficiency, and achieve the effect of ensuring superiority, high initialization accuracy, and small filter stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that for those of ordinary skill in the art, several changes and improvements can be made without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
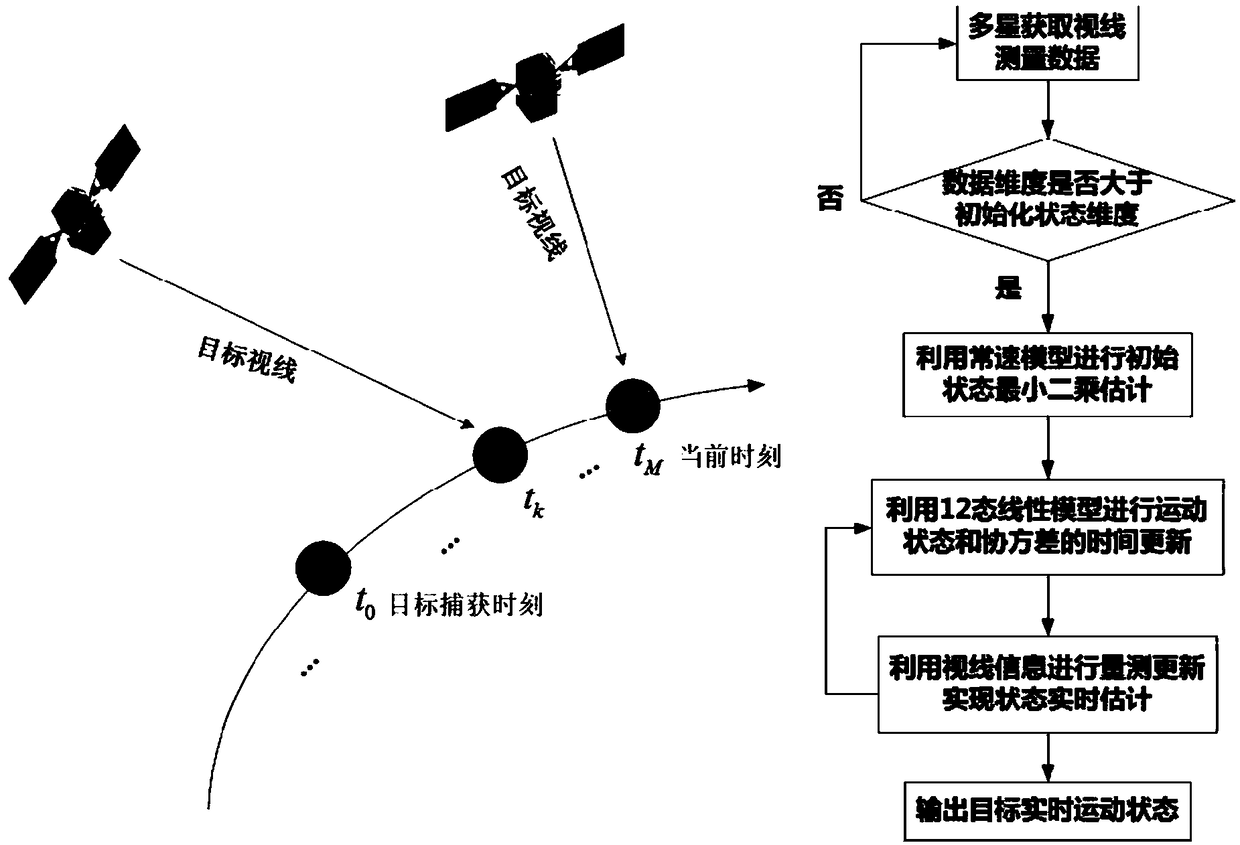
[0057] The multi-satellite cooperative moving target adaptive direction finding, positioning and tracking method provided by the present invention, such as figure 1 As shown, the state initialization process adopts a universal constant speed model, and uses redundant measurement information for least square initialization to achieve high initialization accuracy; the estimation algorithm takes into account accuracy and efficiency, based on 12-parameter linearity State transfer model and li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More