

Adaptive null-space behavior fusion method for multi-robot formation
A multi-robot and fusion method technology, applied in the field of multi-robot formation adaptive zero-space behavior fusion, can solve problems such as unfavorable engineering applications and lack of self-adaptability, and achieve the effect of good self-adaptability, taking into account efficiency and performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0054] In order to make the above-mentioned purposes, features and advantages of the present invention more obvious and understandable, the present invention will be further described below in conjunction with the accompanying drawings:
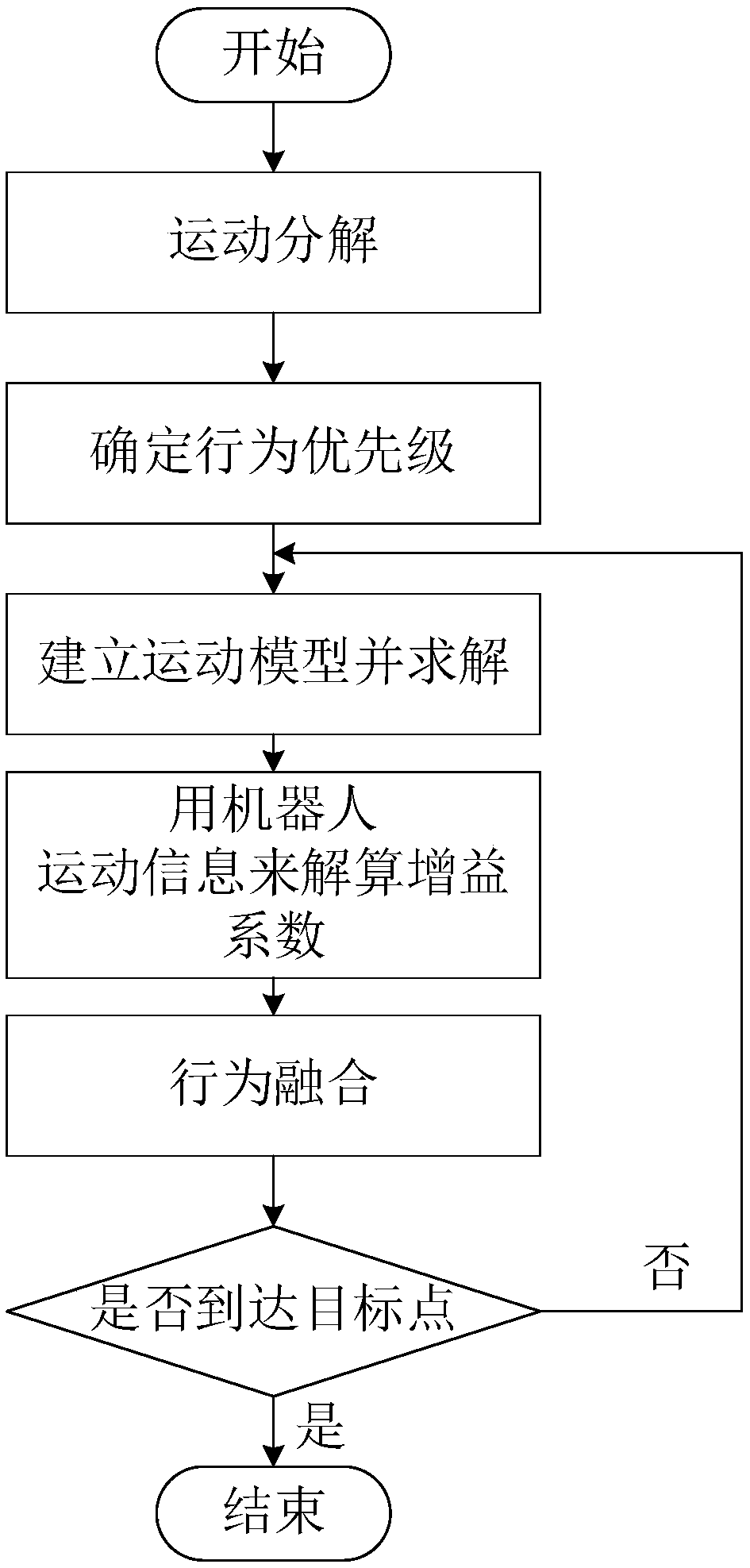
[0055] figure 1 It is a flowchart of a multi-robot formation adaptive zero-space behavior fusion method.
[0056] Technical scheme of the present invention is realized like this:
[0057] (1) Decompose the movement process: in the multi-robot formation movement process, it can be decomposed into three kinds of movement behaviors, running to the target point, avoiding obstacles, and formation.
[0058] (2) Determining the priority of behavior: determine the execution order of the three kinds of motion behavior, and its priority is obstacle avoidance, running to the target point, and formation.
[0059] (3) Establish and solve the motion model of each behavior: Know the starting point, end point, obstacle position, formation expected formatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More