Subregional vehicle bottom shadow detection method based on divergent scanning
A shadow detection and sub-area technology, which is applied in character and pattern recognition, instruments, computer components, etc., can solve the problems of affecting the detection results and decreasing the similarity of template matching, so as to achieve good robustness, improve accuracy and real-time The effect of reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings. The preferred embodiments are only for illustrating the present invention, but not for limiting the protection scope of the present invention.
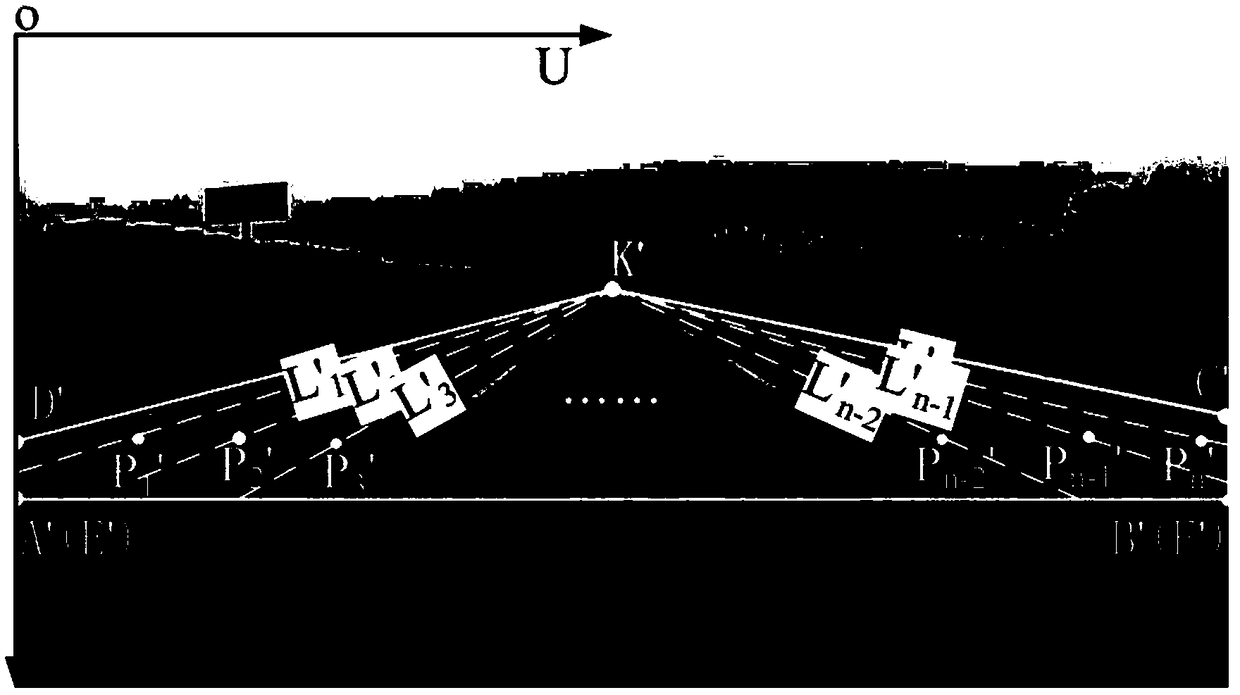
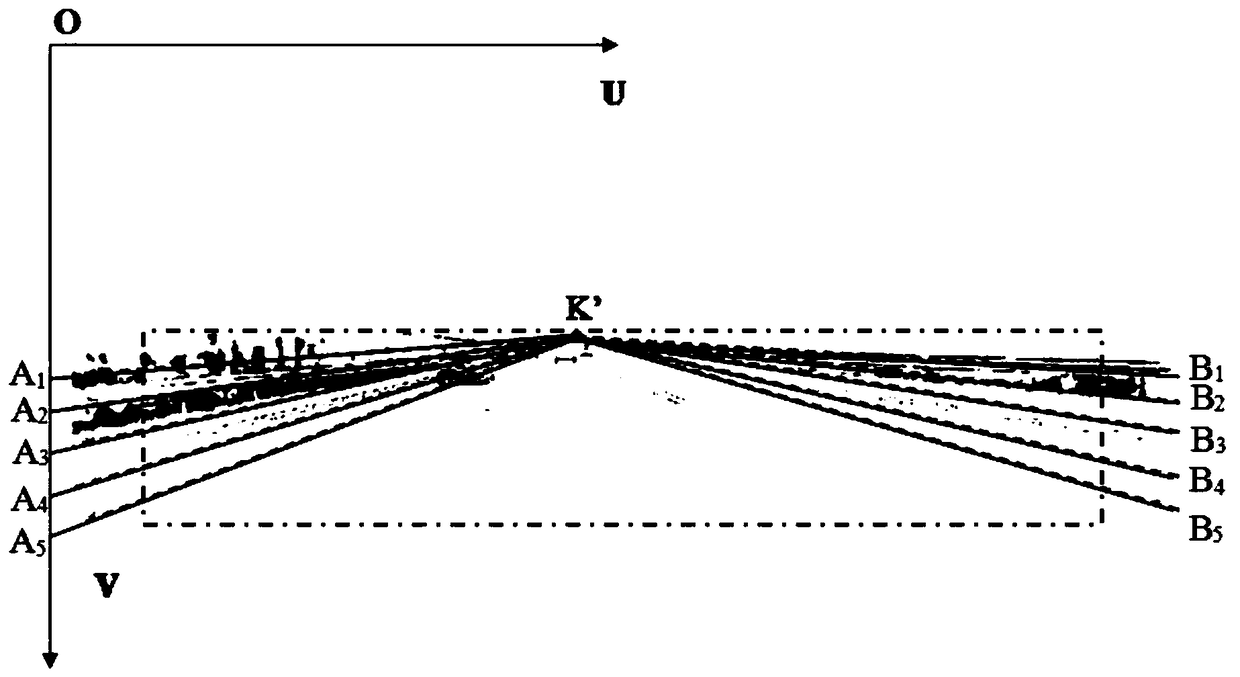
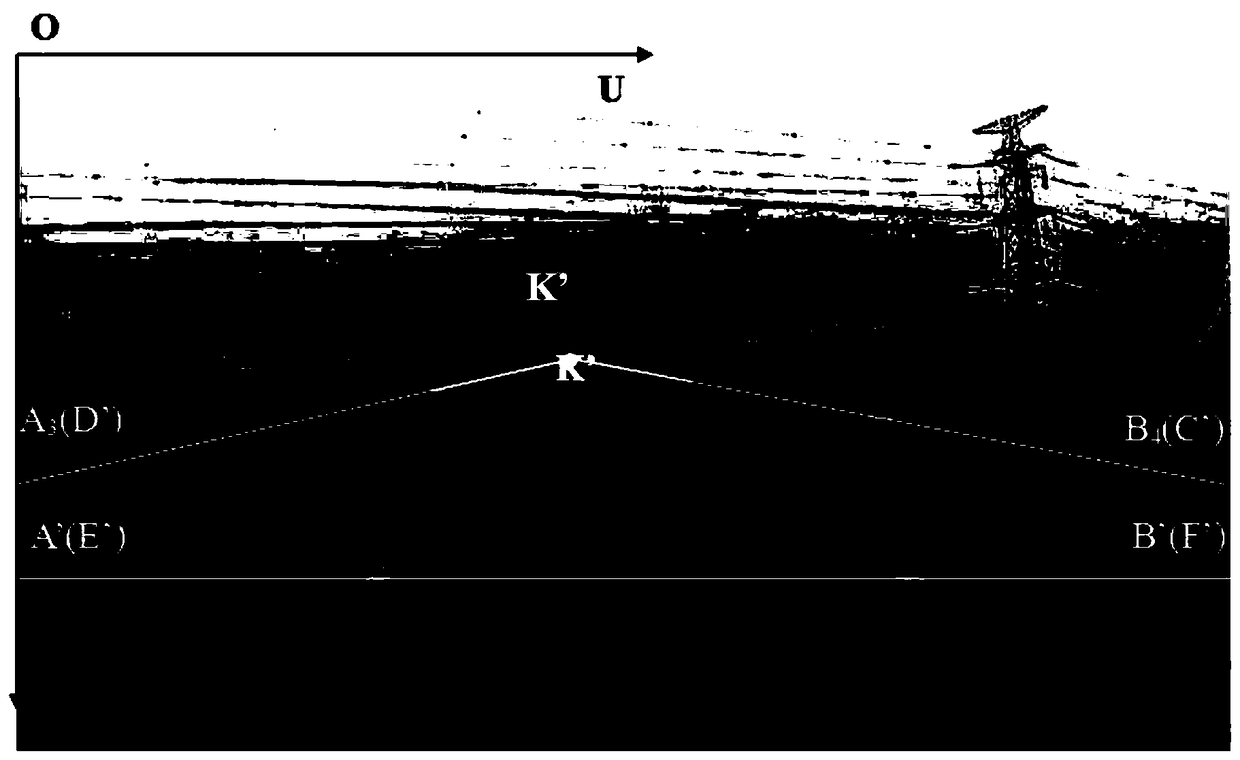
[0027] see Figure 7 , this detection method first selects an image with a resolution of 720×1280 for processing, performs local threshold calculation on a rectangular area 150 pixels longitudinally away from the vanishing point, and obtains a binary image. Determine 5 scan lines for each position point, count the number of black points on each scan line, record the position when it is less than a certain value, and determine the ROI area with the obtained scan line and the horizontal line with a vertical distance of 150 pixels from the vanishing point; , divide the ROI into sub-regions, from top to bottom, according to the principle of perspective, the shadow area of the bottom of the car decreases w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com