

Fusion penetration control method for fillet joints based on near-infrared binocular vision recognition
A technology of binocular visual recognition and fillet joint, which is applied in the field of penetration control of fillet joints based on near-infrared binocular visual recognition, can solve the problems of affecting the fusion width of the reverse side, image arc interference, etc., and achieves rich information and images. Clear, high practical value effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the purpose, technical solution and advantages of the present invention more clear and definite, the present invention will be further stated below in conjunction with the accompanying drawings and specific embodiments. The following examples serve to illustrate the invention, but do not limit the invention.
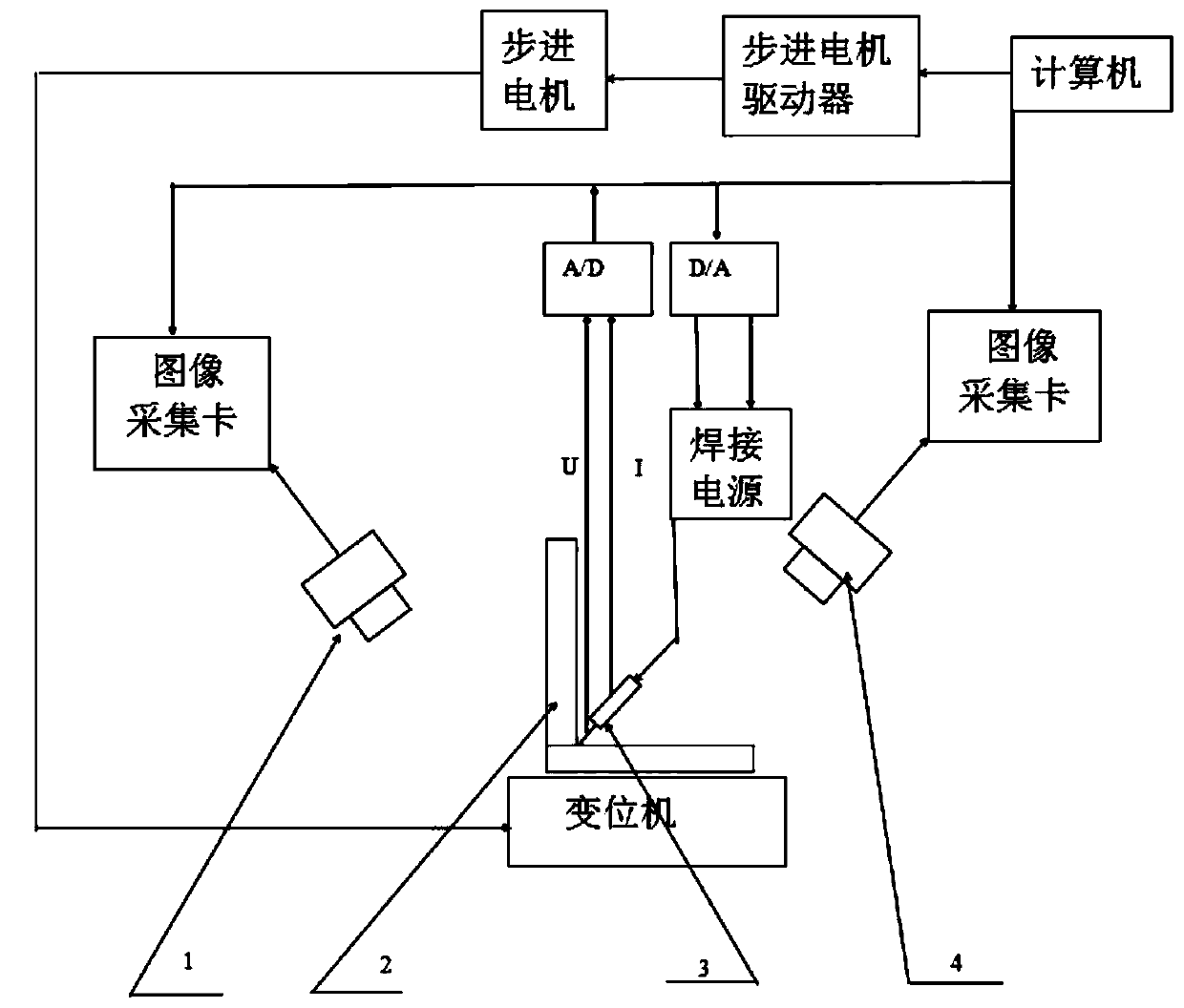
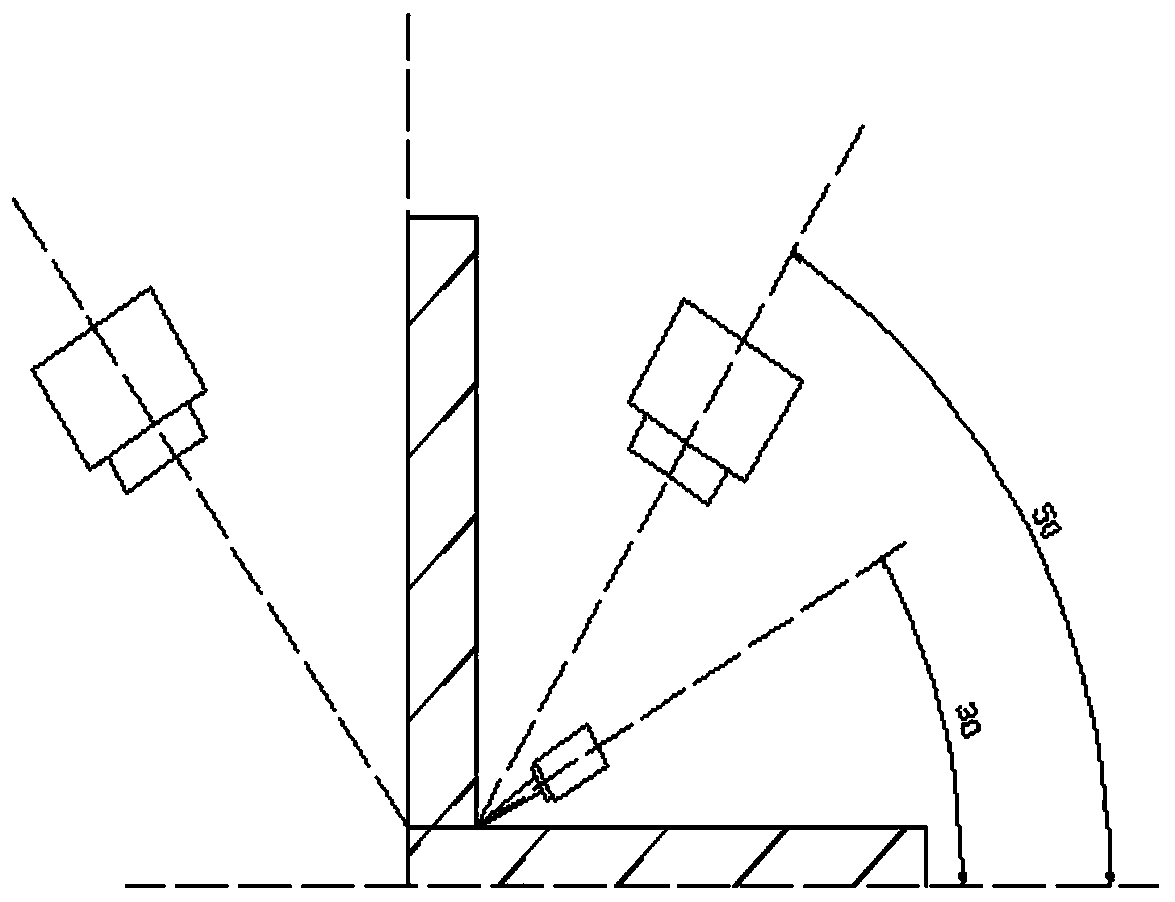
[0031] Such as figure 1 As shown, the system working principle diagram of the fillet joint penetration control method based on near-infrared binocular visual recognition of the present invention mainly includes: two near-infrared scanning CCD cameras 1 and 2 on the front and back, a welding torch, and a corner to be welded Pick up the workpiece. Among them, two near-infrared scanning CCD cameras on the front and back are fixed on both sides of the workpiece to be corner-jointed with fixtures according to the normal line of the lens end face and the normal line of the workpiece surface at an angle of 30°-45°, and the welding torch 2 is installed o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More