

Spherical amphibious robot
A robot and spherical technology, applied in the field of robots, can solve the problems of inability to achieve high concealment operations, insufficient gravity, large load of horizontal steering gear, etc., and achieve the effects of tracking and monitoring targets, reducing rotation resistance, and saving energy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in detail below with reference to the accompanying drawings and examples.
[0040] This embodiment provides a spherical amphibious robot oriented to a transitional amphibious environment, suitable for operations in a narrow environment, with high maneuverability, high concealment, multiple motion modes, long battery life, strong carrying capacity, and recyclable.
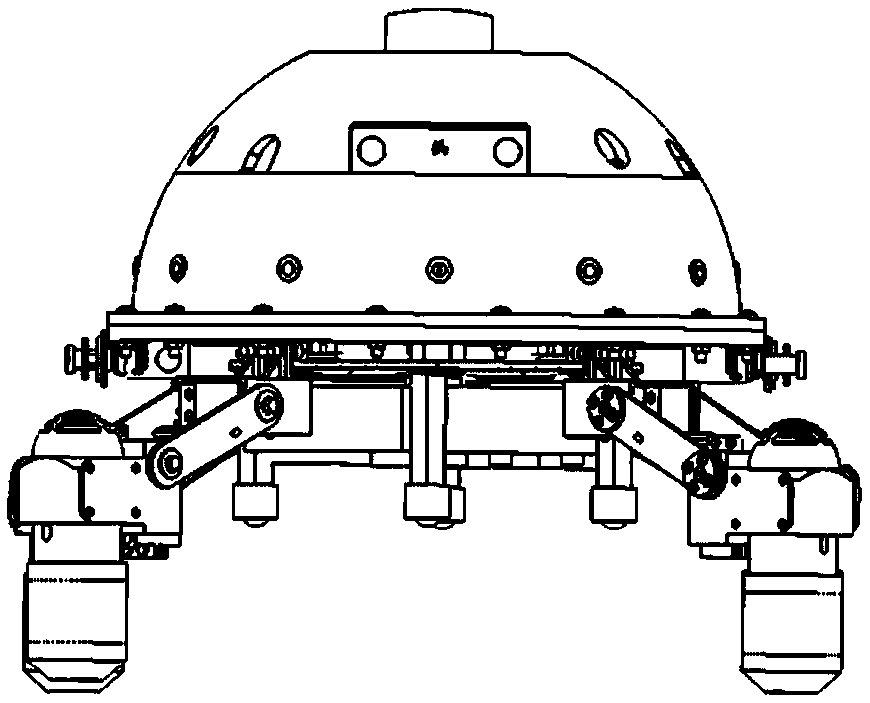
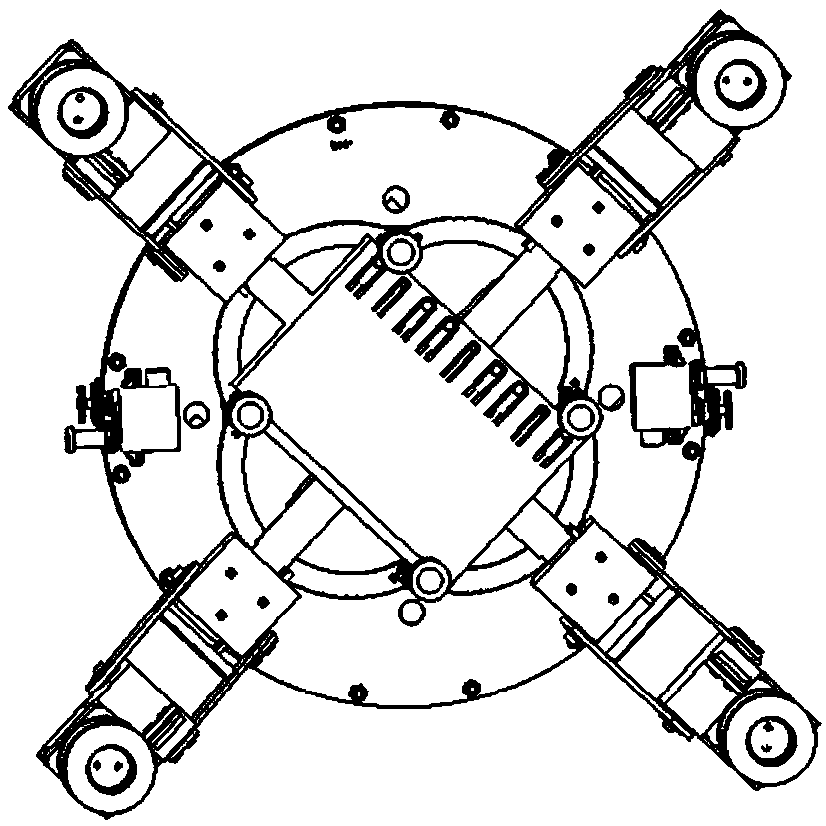
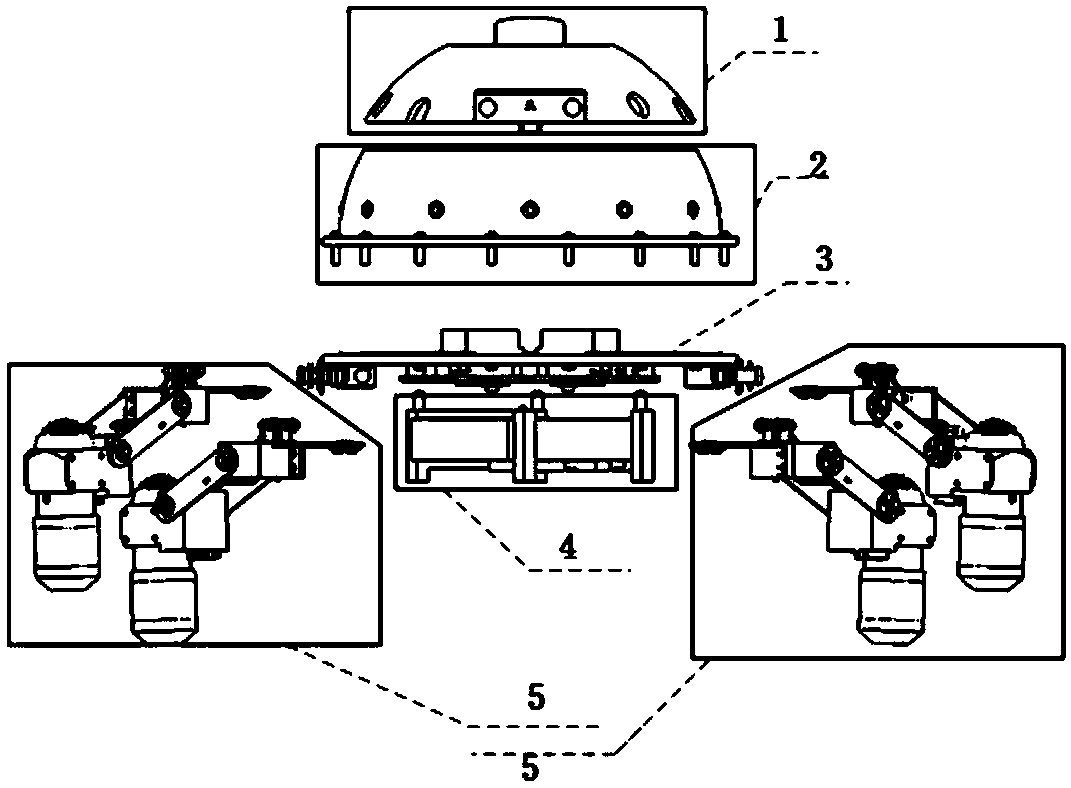
[0041] Such as Figure 1-3 As shown, in order to make the spherical robot more intelligent, more autonomous, and more convenient to complete tasks in the amphibious environment, the spherical robot adopts an upper spherical shell with adjustable buoyancy, an independent battery compartment, and a slide rail mechanism to reduce the load of the horizontal steering gear . Specifically, the spherical amphibious robot includes: an upper spherical shell, a middle partition 3 , a leg structure 5 and a slide rail mechanism.
[0042] After the previous amphibious robots entere...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More