

Obstacle-jumping system for quadruped robot
A quadruped robot and robot technology, applied in the field of robotics, can solve the problem that quadruped robots cannot jump through obstacles, and achieve the effect of ensuring reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
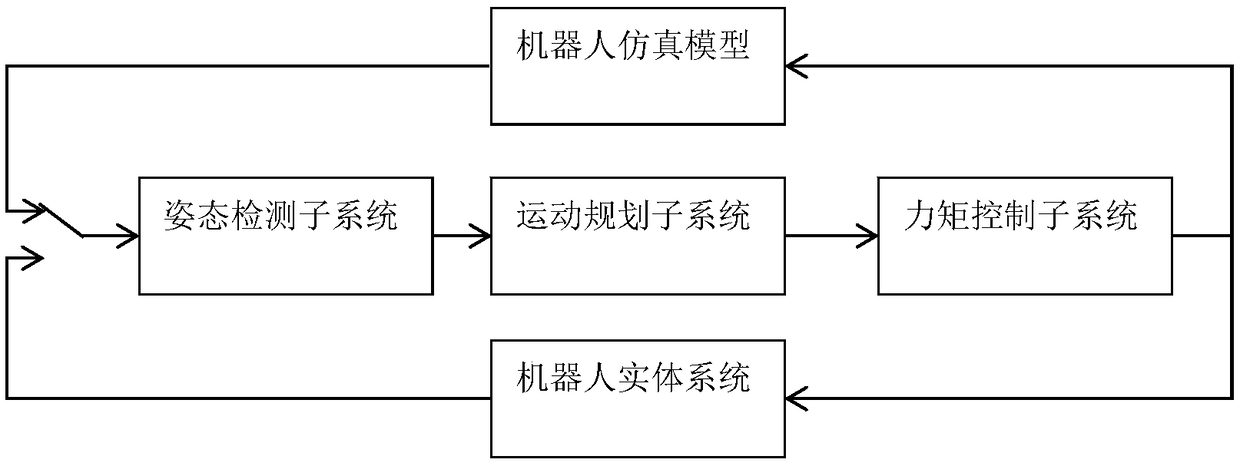
[0025] Such as figure 1 As shown, the quadruped robot jumping motion control system includes attitude detection subsystem, motion planning subsystem, and torque control subsystem. The attitude detection subsystem processes and optimizes the signal returned by the robot sensor or the simulated attitude and joint signals returned during the simulation process to obtain ideal real-time motion data. The motion planning subsystem plans the ideal jumping trajectory of the robot by analyzing information such as terrain changes and obstacle sizes, and calculates its expected displacement, velocity, and acceleration values. The torque control subsystem calculates the torque input required by each joint according to the ideal motion trajectory planned by the motion, and uses the PD controller to stabilize the motion state and resist the external disturb...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More