

Seastar-like soft robot driven by shape memory polymer and its control method
A technology of memory polymers and robots, which can be used in transportation and packaging, ships, and underwater operating equipment. The effect of impact power
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to fully understand the purpose, features and effects of the present invention, the present invention will be described in detail through the following specific implementation modes.
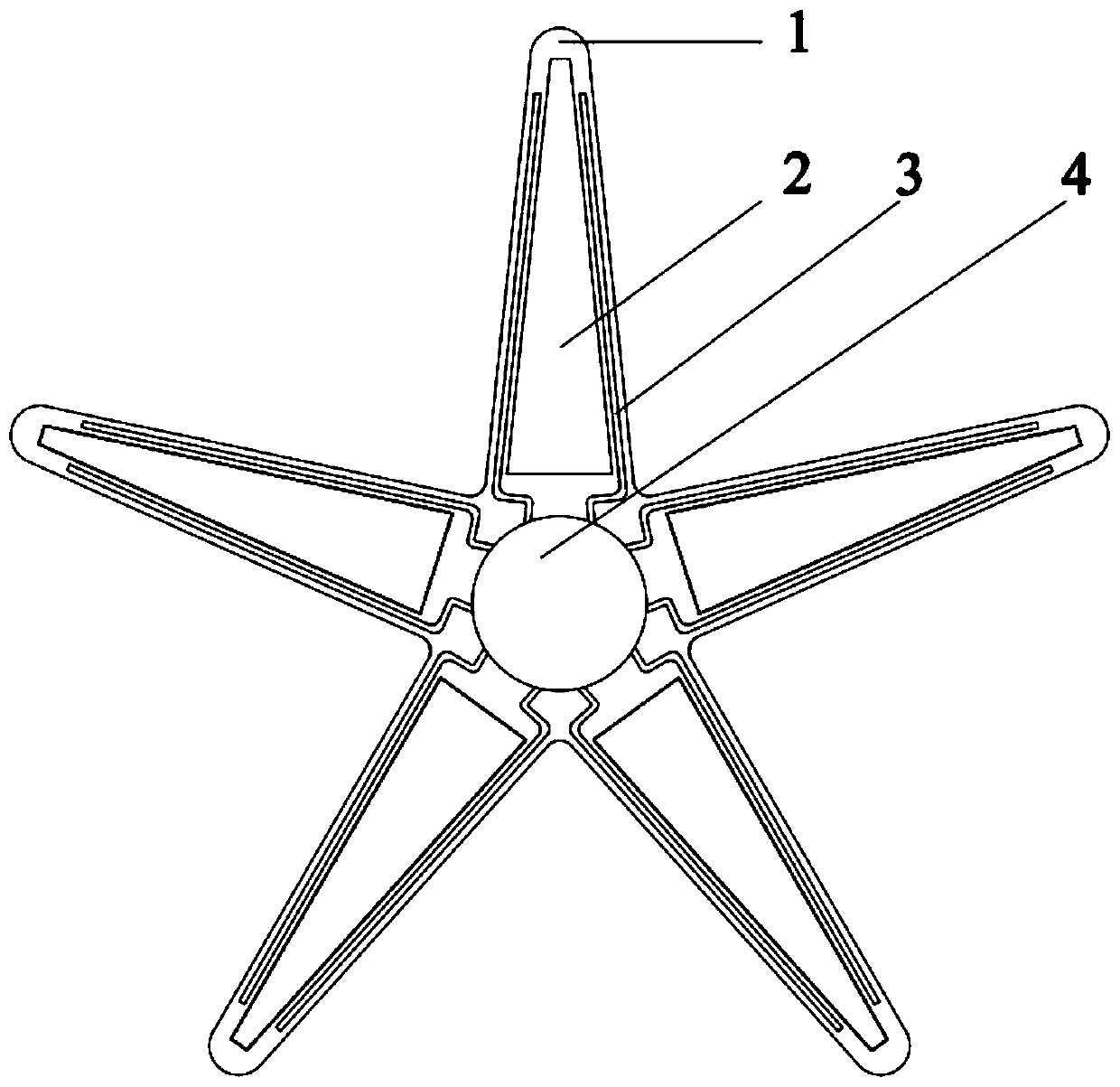
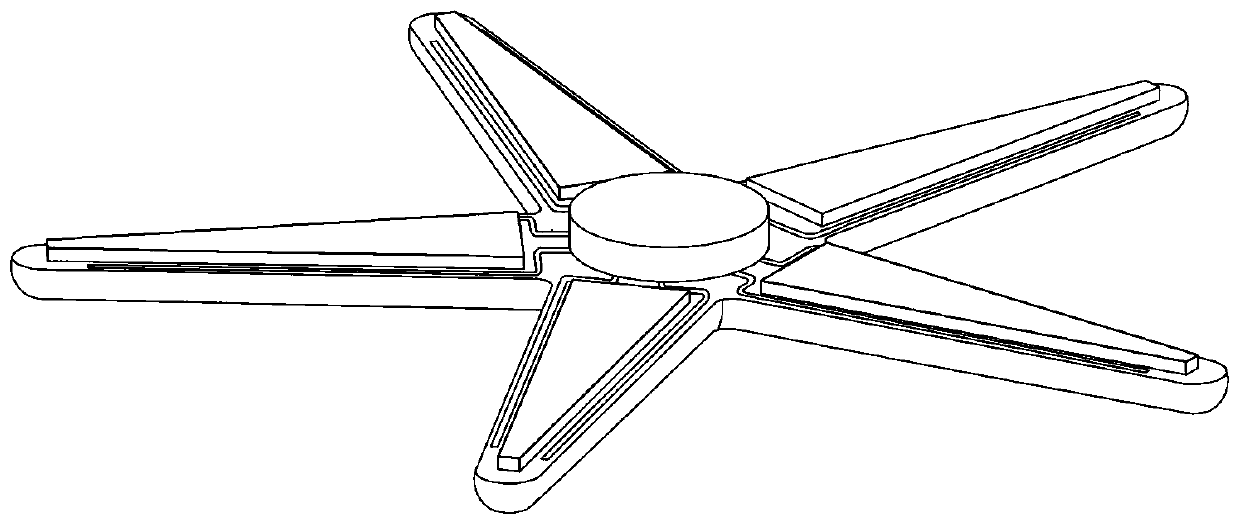
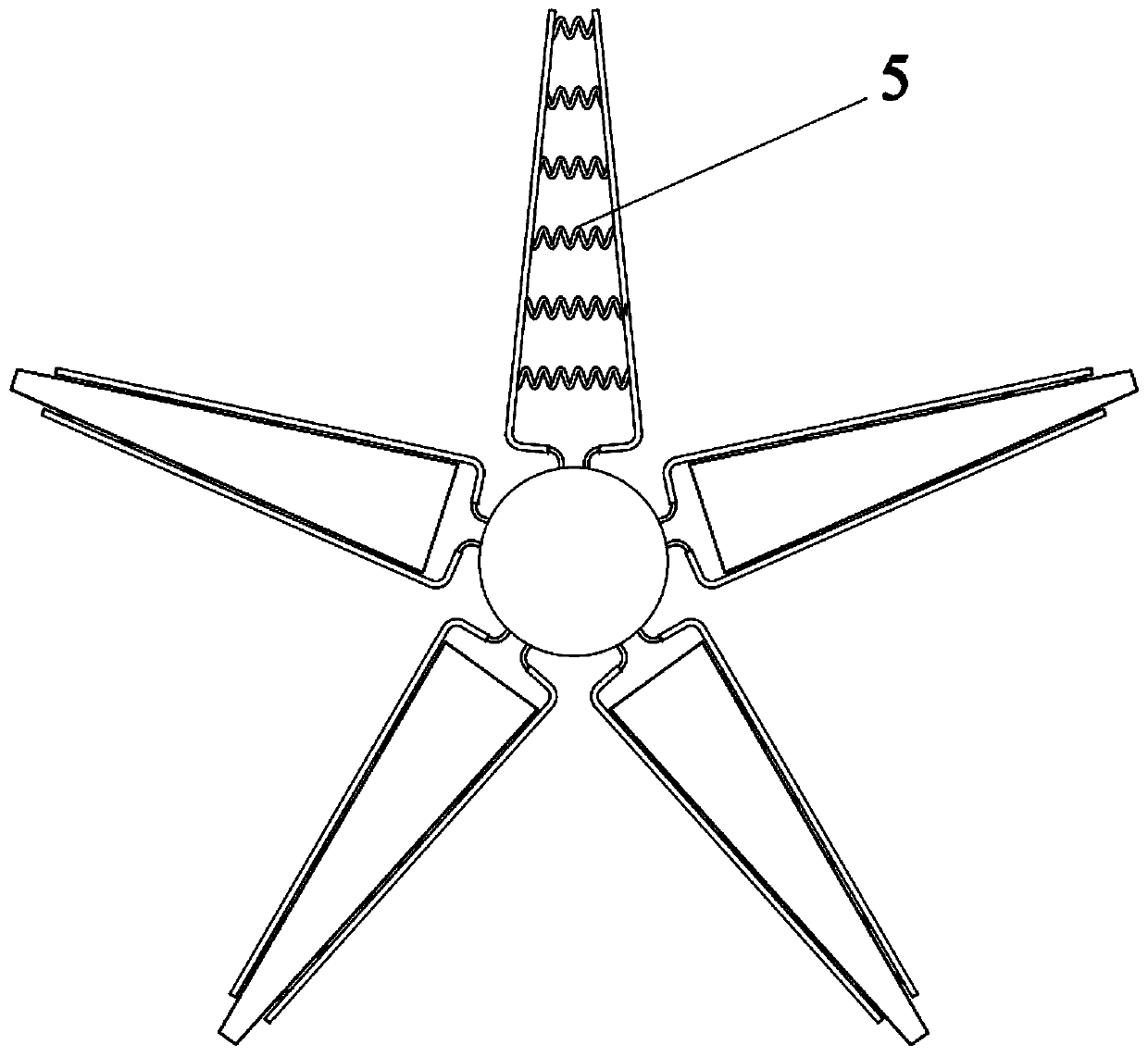
[0023] Such as figure 1 , 2 , 3, 4, 5, 6 and 7, a shape-memory polymer-driven soft crawling robot of the present invention mainly includes a lower side silicone coat 1, a shape-memory polymer module 2, a heating wire 5, and a carbon nanotube wire 3 , the control terminal 4 and the upper side silicone jacket 6. Wherein the control end 4 is fixed at the reserved control end groove in the middle of the lower side silicone jacket 1; the shape memory polymer module 2 is made of the upper side shape memory polymer 7 and the lower side shape memory polymer 9 with a heat insulating interlayer 8, the upper side shape memory polymer 7, the lower side shape memory polymer 9 are closely attached to the heat insulation interlayer 8; the heating wire 5 is evenly embedded in the heat insulati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More