

A Turtle-like Robot Driven by Dielectric Elastomers
A dielectric elastomer, robot technology, applied in non-rotating propulsion elements and other directions, can solve problems such as poor environmental adaptability, less freedom, and inapplicability, achieve good compression resistance and impact resistance, improve stability, Easily replaceable effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to fully understand the purpose, features and effects of the present invention, the present invention will be described in detail through the following specific implementation modes.
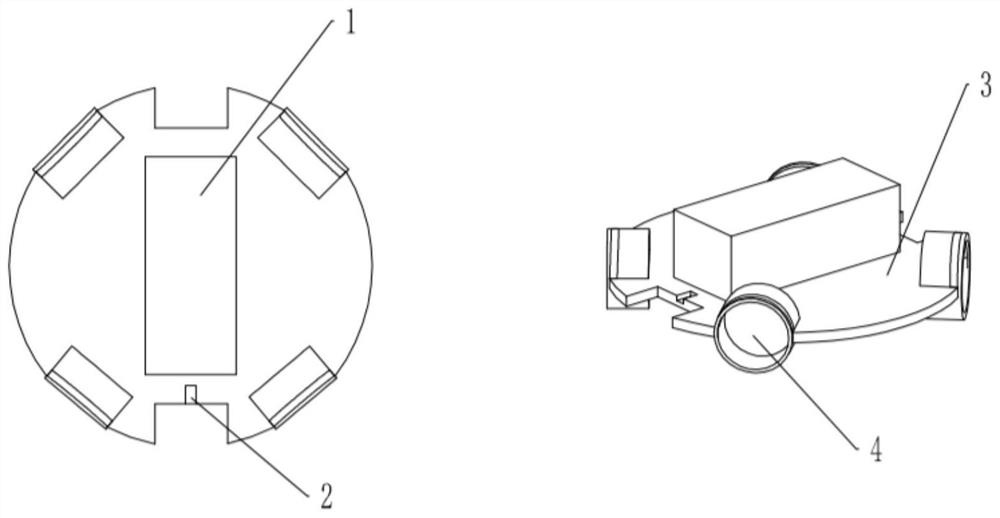
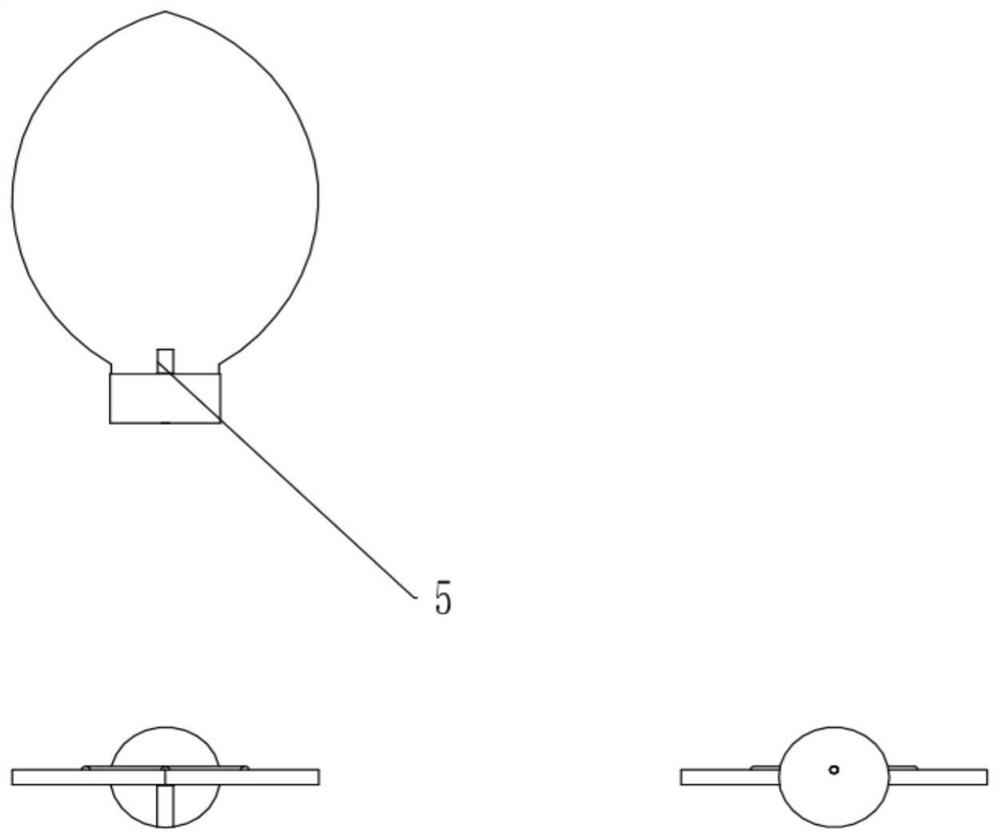
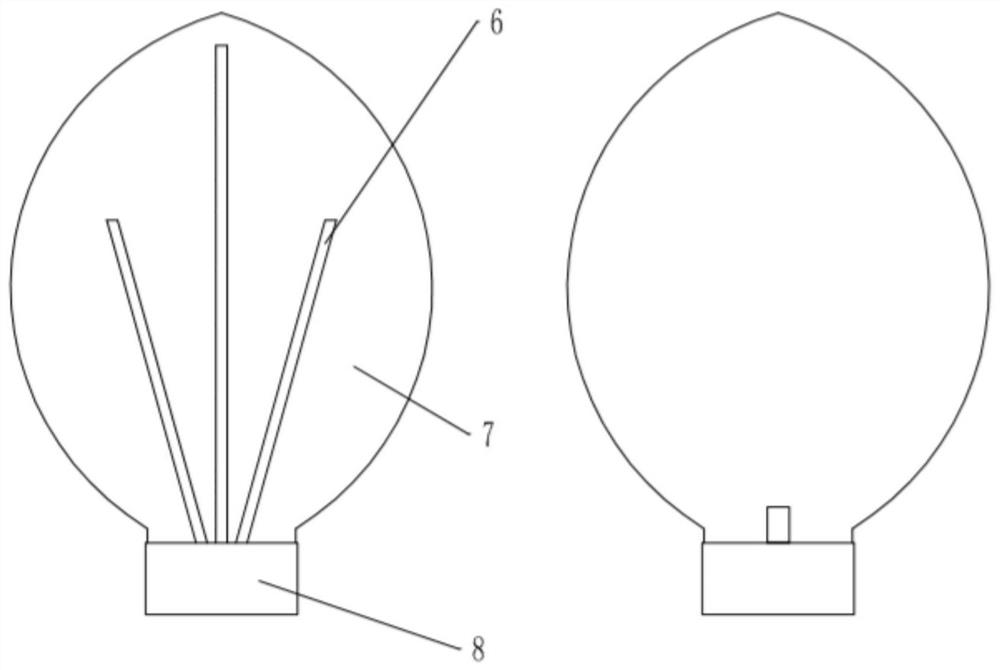
[0021] Such as figure 1 , 2 , 3, 4, and 5, the present invention is a bionic sea turtle based on a dielectric elastomer polymer, which mainly includes a main body panel 3, a control terminal and a power module 1, a dielectric elastomer drive module, and a wireless device for the head. The signal transceiving module 9, the tail inlet and outlet mechanism 10, the casing 11 and the like. Among them, the control terminal and the power module 1 are fixedly installed on the main board 3; the main board 3 is mainly made of polyvinyl chloride plastic, and the wires can be embedded in the main board 3 in advance; the dielectric elastomer drive module is mainly It consists of three parts: the root handle 8, the flipper 7 and the supporting fiber 6. The flipper 7 is made of a dielectric e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More