

PIO-based round orbital space vehicle formation reconfiguration type anti-collision path planning method
A formation reconstruction and path planning technology, which is applied in the directions of instruments, three-dimensional position/course control, vehicle position/route/altitude control, etc., can solve problems such as complex calculations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
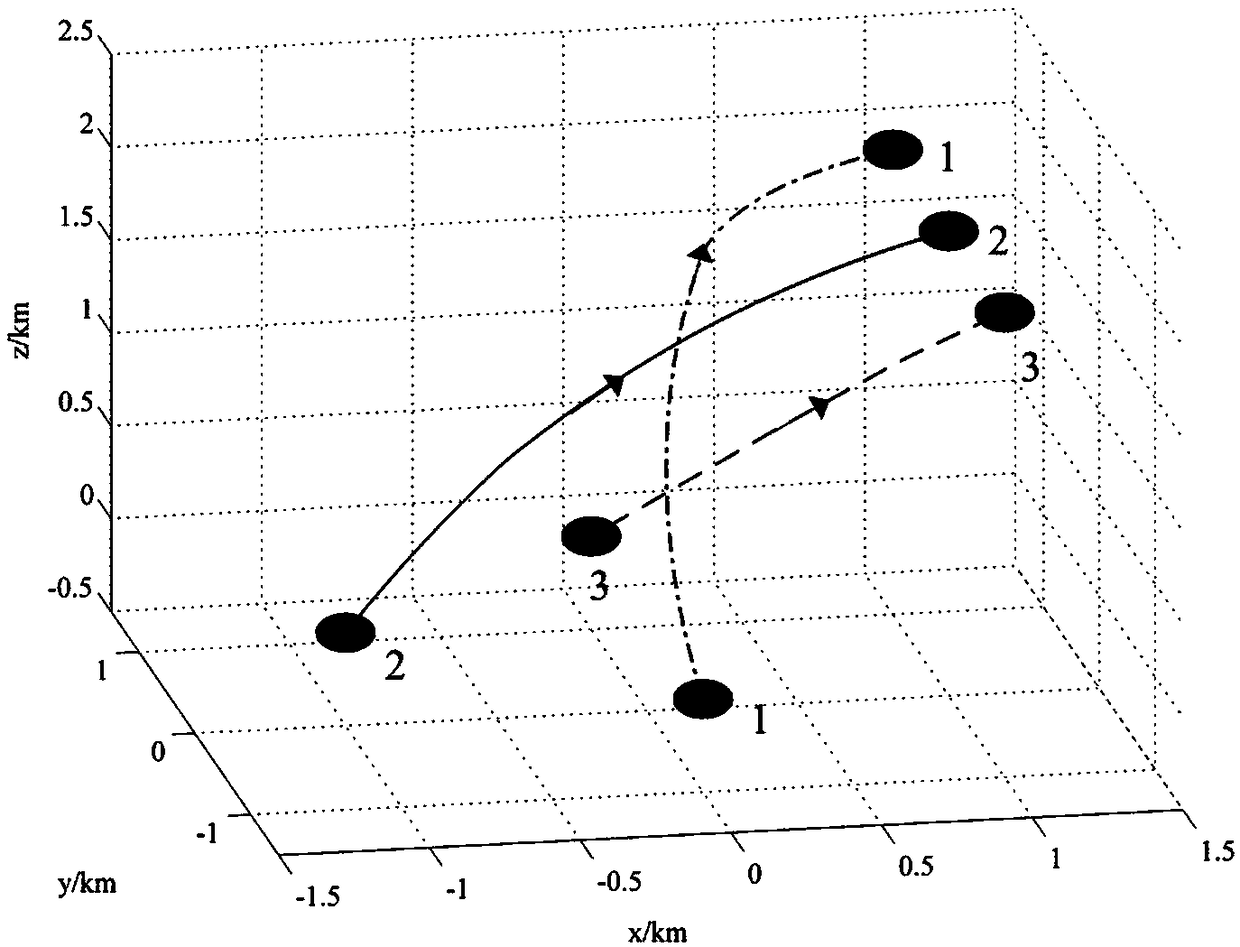
[0070] Given the initial position and end position of the formation composed of three spacecraft, the iteratively optimized flight path and the value of the corresponding fitness function after each iteration are calculated through the improved pigeon group intelligent optimization algorithm.
[0071] The initial parameters required for the simulation are shown in Table 1. Among them, R is the geomagnetic factor coefficient, which determines the change of the iterative step size of the algorithm. Generally, it is related to the number of iterations and the optimization space of the problem, and its value is generally artificially set to 0. Between -1. n is the average angular velocity of the circular orbit of the spacecraft, which is related to the orbital altitude, and the orbital altitude is set to 400km in this paper. σ u1 , σ u2 , σ u3 are the standard deviations of position errors on the three coordinate axes of the spacecraft in its satellite-based coordinate system, ...
Embodiment 2
[0081] The initial parameters of the algorithm still use the data in Table 1. Expand the spacecraft formation to 9, and the coordinates of the initial and final configurations in the C-W coordinate system are shown in Table 4.
[0082] Table 4 Coordinates of start and end positions of 9 spacecraft formations
[0083]
[0084]
[0085] Depend on Figure 6 It can be seen that the algorithm can also be applied to the path planning problem of larger-scale spacecraft formation. Figure 7 This is the change graph of the fitness function with the number of iterations at this time. It can be seen that the algorithm still has good optimization characteristics at this time. Due to the increase in the scale of the problem, the number of iterations to converge to the final result has increased, and the time has been relatively extended. .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More