

Novel self-adaptive weight stereo matching method
An adaptive weight, stereo matching technology, applied in image data processing, instrumentation, calculation, etc., can solve the problems of discontinuous depth, inaccurate matching between occluded areas and weak texture areas, and insurmountable problems, so as to enhance and reduce the matching effect. The effect of block effect and block effect removal
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
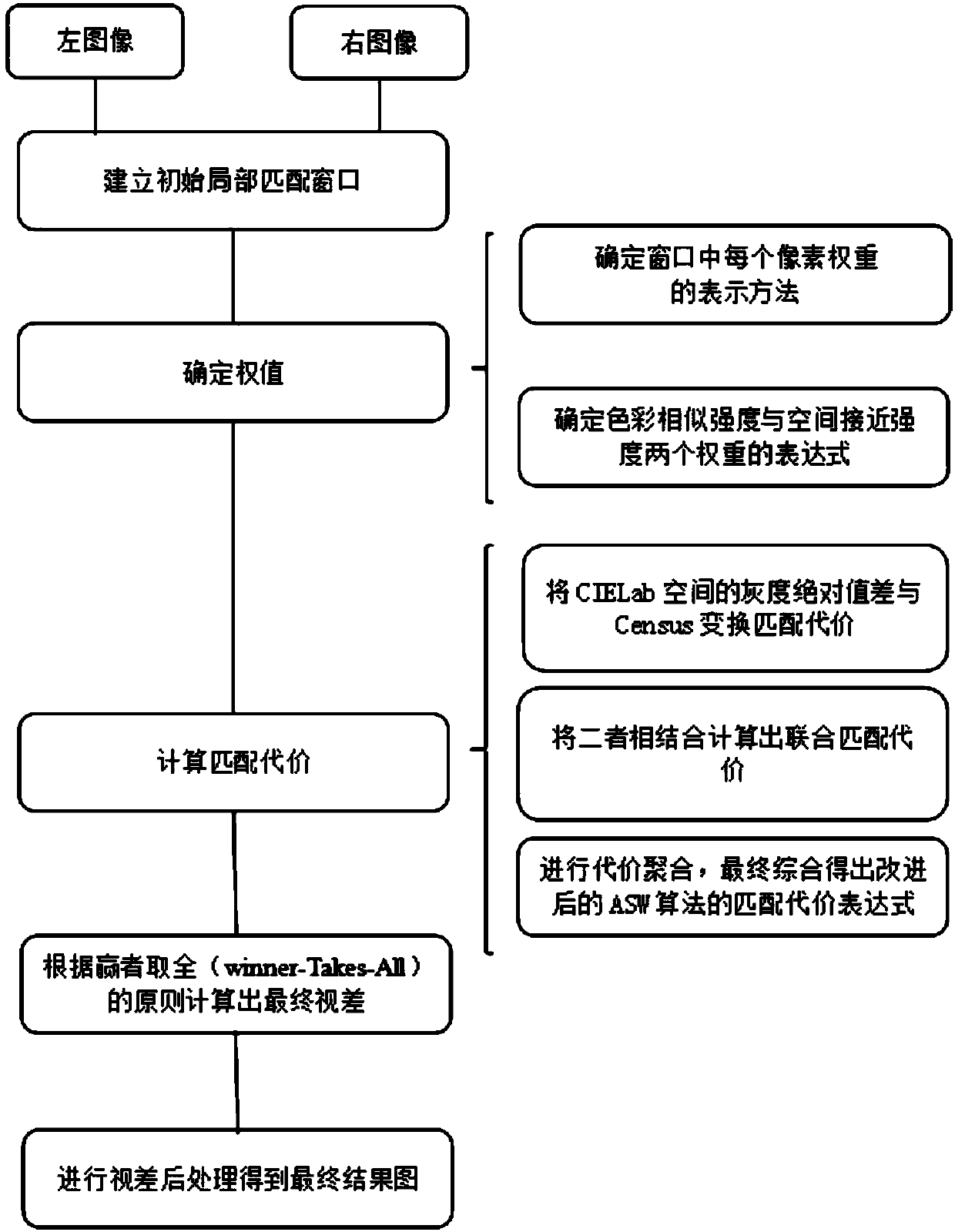
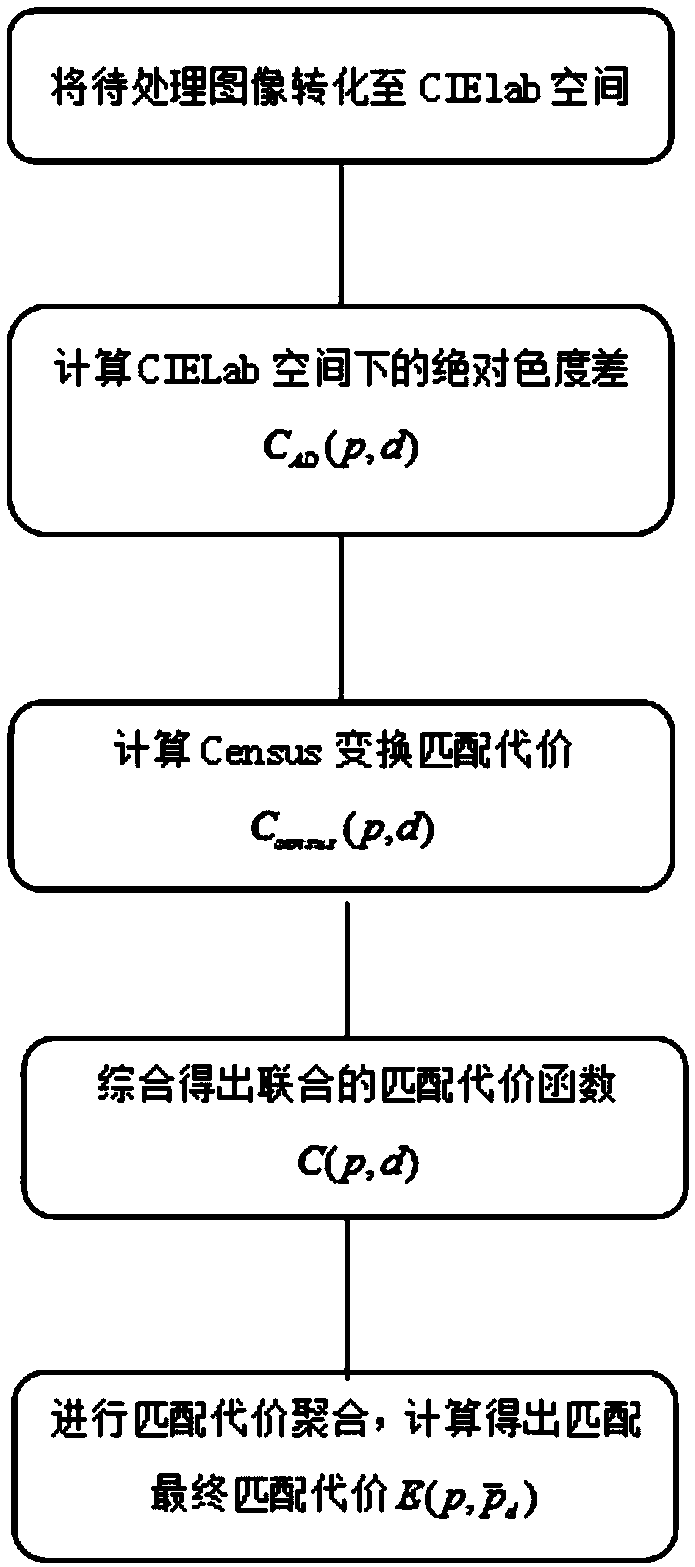
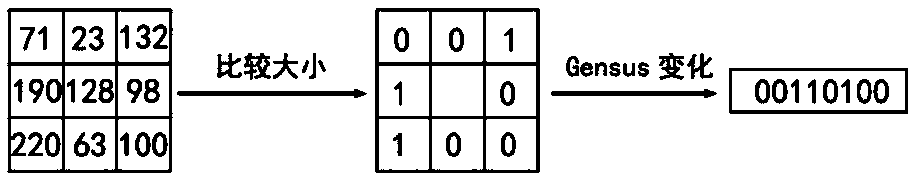
[0043] Such as figure 1 , figure 2 and image 3 As shown, a new adaptive weight stereo matching method includes the following steps:
[0044] The images captured by the left and right cameras of S1 are respectively the left image and the right image, one of which is set as the reference image, and the other is the target image, and the left and right images establish an initial local matching window;
[0045] Stereo matching is based on the shooting of the same scene by two cameras located in different positions. The image obtained through the binocular vision system has the same mode as the binocular perception of the scene information. The left and right images obtained by the two cameras are symmetrically called the left image and the right image. The left image is set as the reference image, and the other is the target image. The main difficulty of the local stereo matching algorithm lies in the selection of the window size. If the window is too large, the matching accu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More