

Accurate positioning method of driverless cars in underground parking
An underground garage and precise positioning technology, applied in the field of driverless car research, can solve problems such as easy failure, affecting positioning accuracy, noise or the influence of dynamic obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The present invention will be described in detail below in conjunction with accompanying drawing:
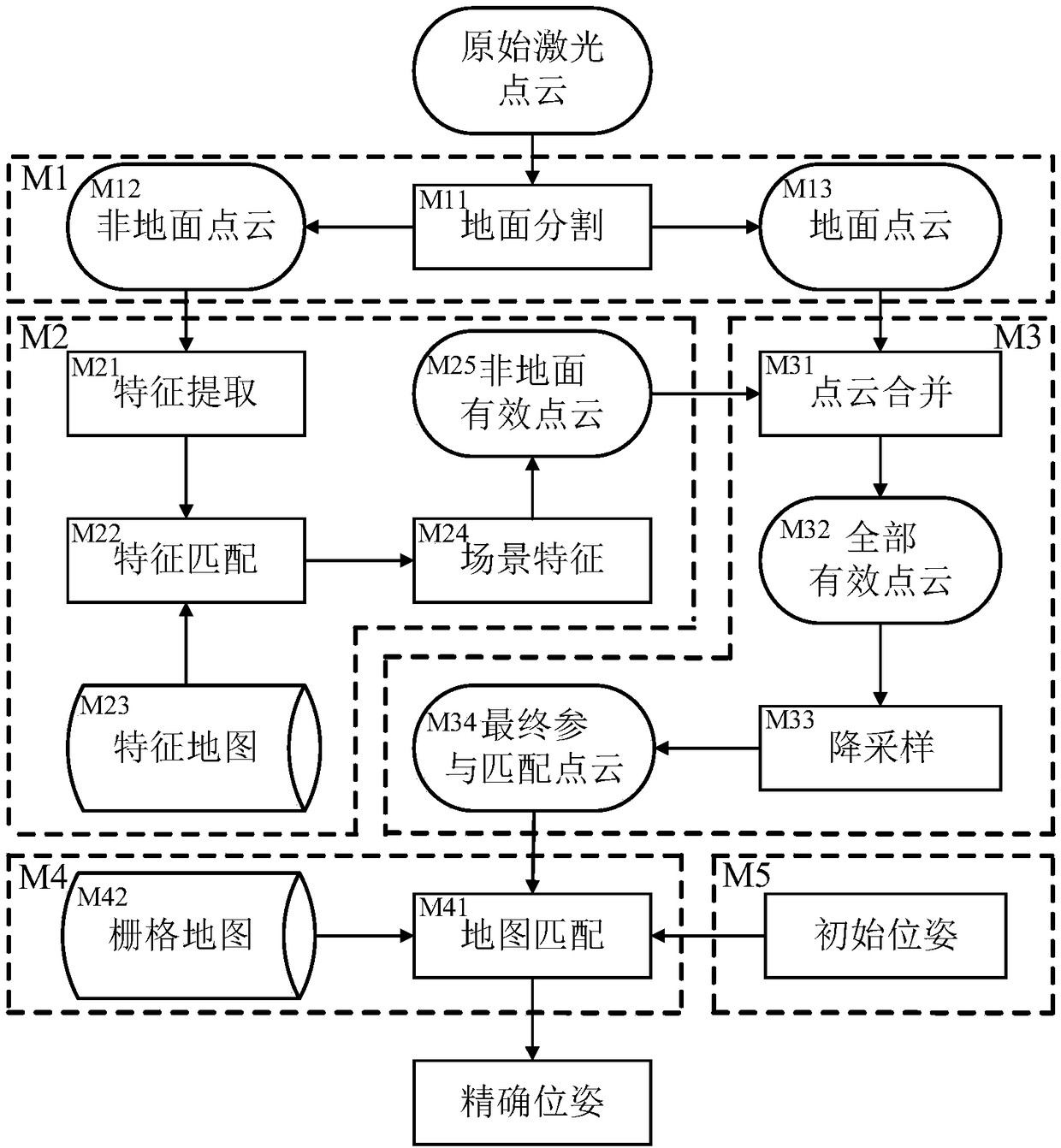
[0068] see figure 1 , which is a schematic diagram of the overall framework of the system of the present invention, including five functional modules, which are respectively:
[0069] The purpose of the ground segmentation module M1 is to obtain the ground point cloud M13 and the non-ground point cloud M12 through the ground segmentation module M11, wherein the ground segmentation module is realized by a Gaussian process regression algorithm. The ground point cloud and non-ground point cloud are denoted as P Grd and P NoGrd ;
[0070] Feature extraction and feature matching, and non-ground effective point selection module M2, which includes feature extraction module M21, feature matching module M22, to obtain scene features M24, and then inversely obtain non-ground effective point cloud M25, and also includes pre-made features Map M23, in which the feature extraction ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More