

Method for generating semantic grid map and device thereof
A grid map and semantic technology, applied in the field of mobile robots, can solve the problems of unable to provide reliable road signs, unable to express environmental objects, unable to remove dynamic object noise, etc., to achieve the effect of increasing understanding
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] In order to make the objectives, technical solutions, and advantages of the present invention clearer, the following further describes the present invention in detail in conjunction with specific embodiments and with reference to the accompanying drawings. However, those skilled in the art know that the present invention is not limited to the drawings and the following embodiments.
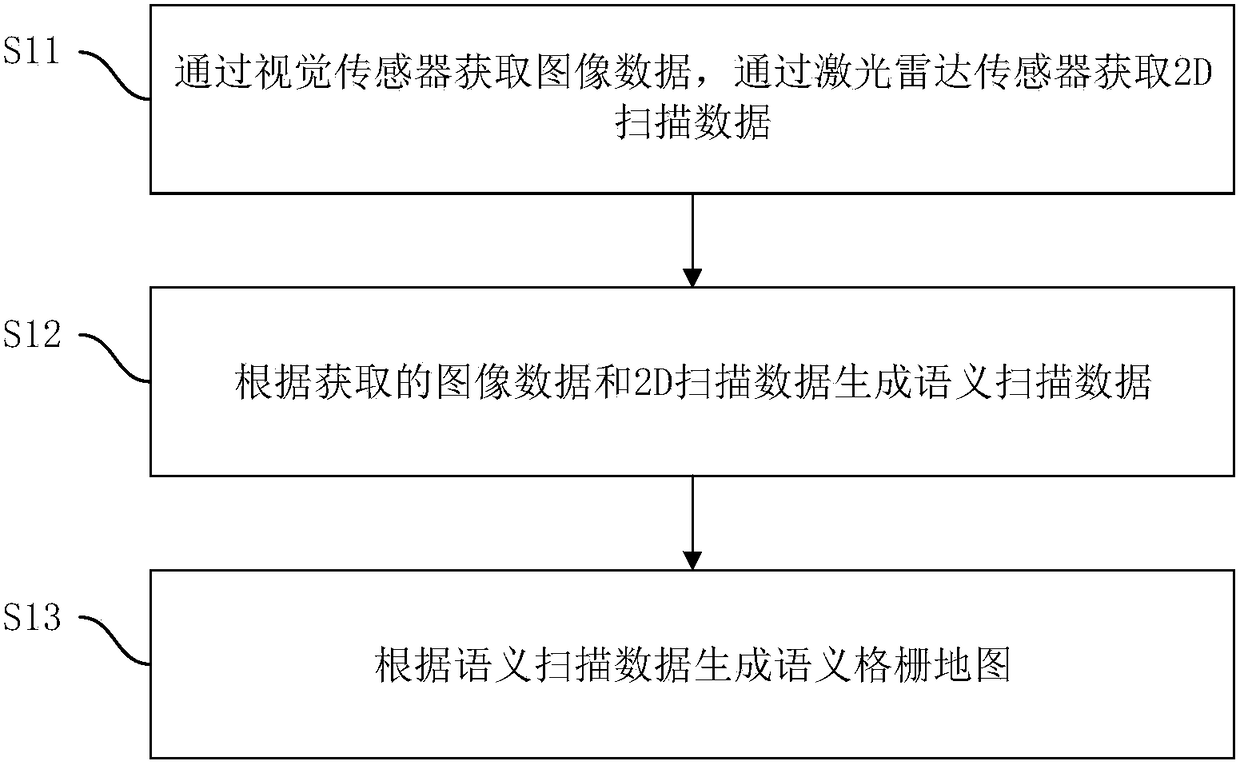
[0062] The embodiment of the present invention provides a method for generating a semantic grid map, such as figure 1 As shown, the method includes the following steps:
[0063] Step S11, acquiring image data of the environment through a vision sensor, and acquiring 2D scan data of the environment through a lidar sensor;
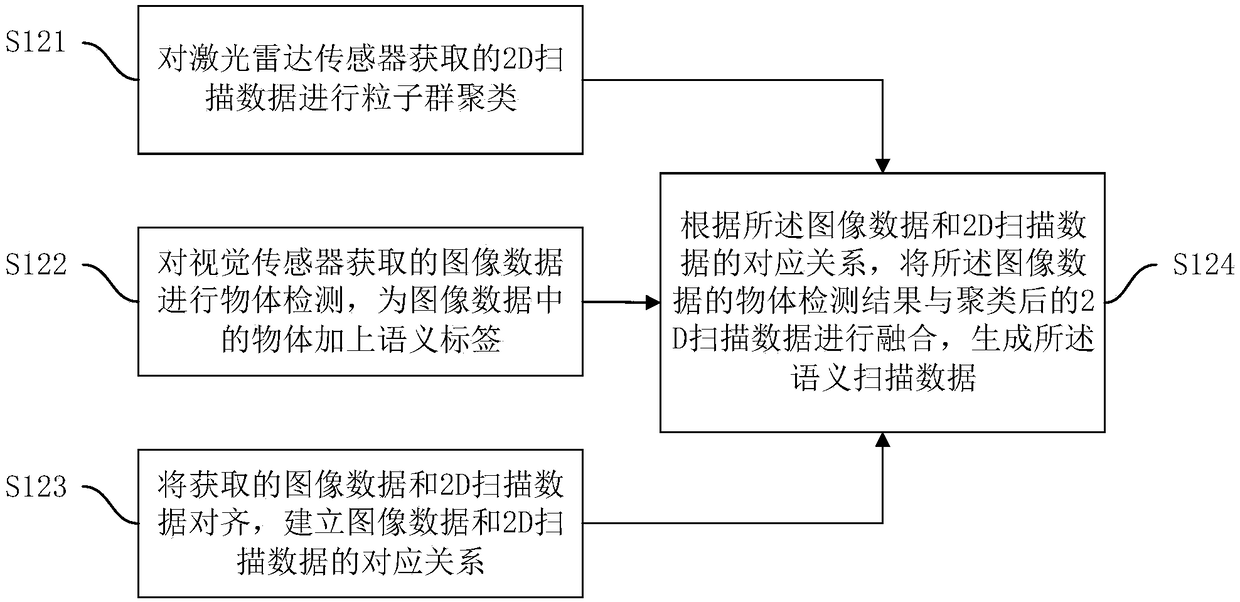
[0064] Step S12, fusing the acquired image data and 2D scan data to generate semantic scan data;
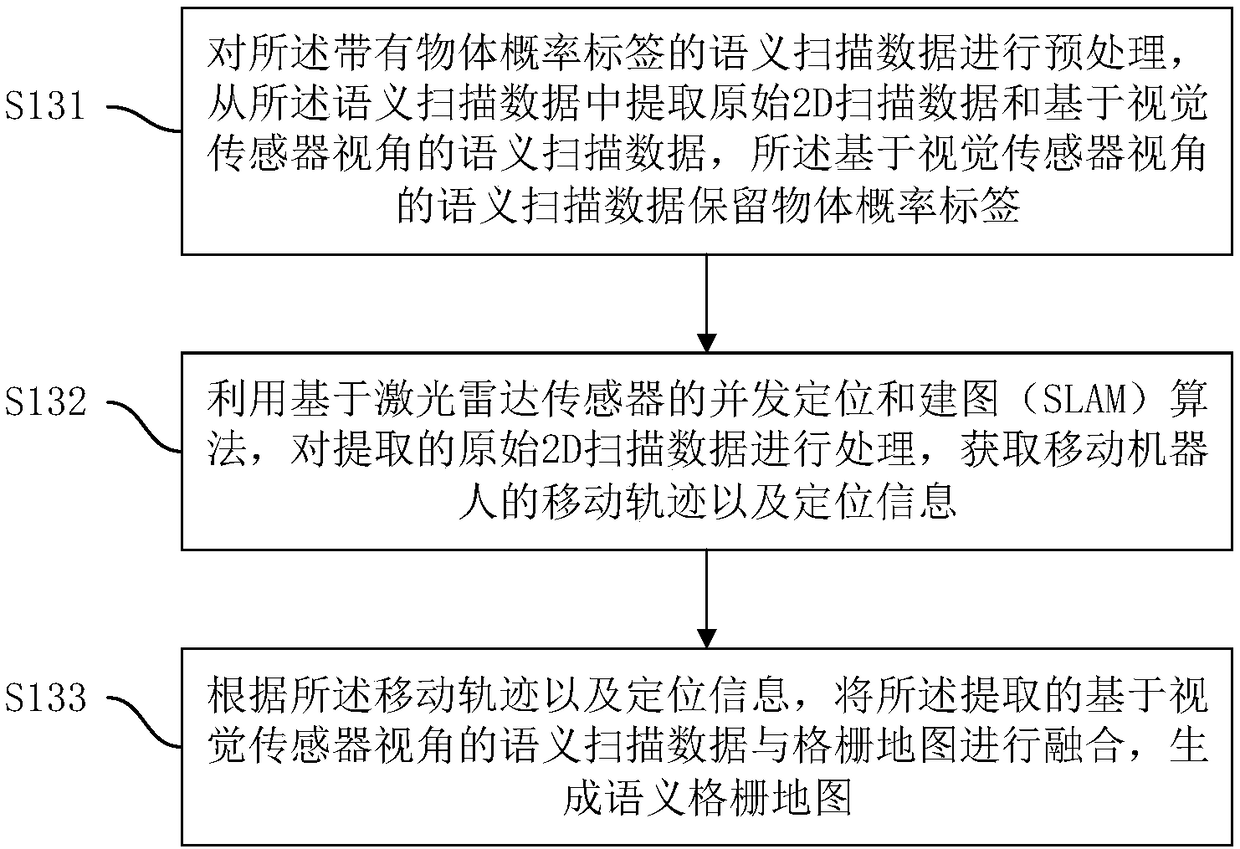
[0065] Step S13, fusing the generated semantic scan data with the grid map of the environment to generate a semantic grid map.
[0066] Wherein, the lidar sensor and the vision senso...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More