Dual-branch Outdoor Unstructured Terrain Segmentation Network Based on Parallax and Plane Fitting
An unstructured, terrain segmentation technology, applied in the field of computer vision, can solve problems such as incomplete application, achieve good terrain segmentation performance, and improve adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The specific implementation manners of the present invention will be further described below in conjunction with the accompanying drawings and technical solutions.
[0050] The invention performs ground fitting and ground deviation calculation based on Matlab, and then builds a network model based on the Caffe framework.
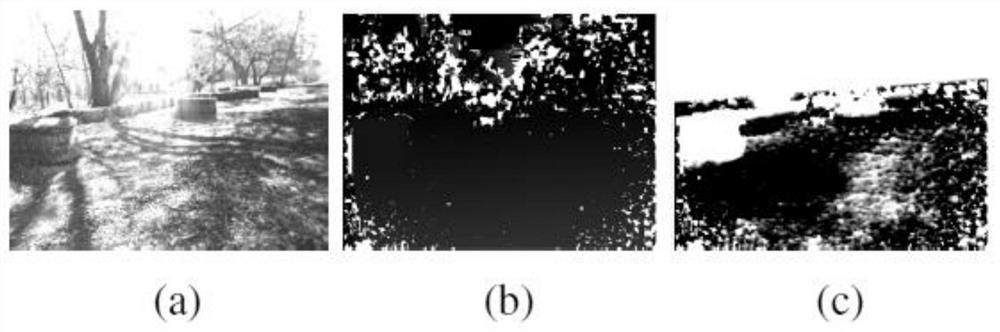
[0051] Step 1: Data preparation, such as figure 1 The disparity map shown in (b) and the corresponding feasible and obstacle region labels.
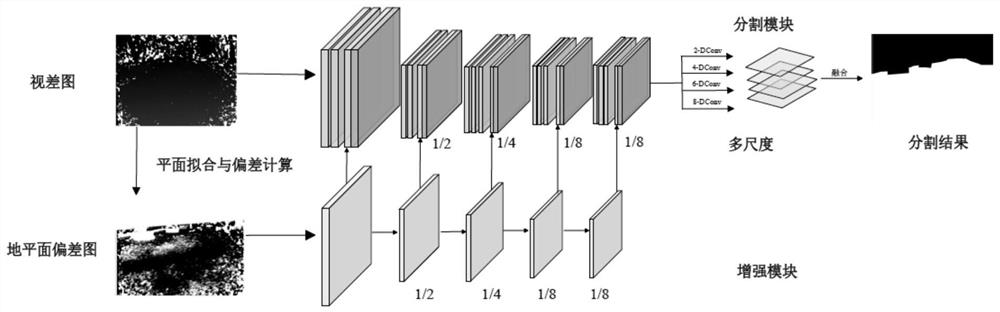
[0052] Step 2: Input a parallax image, perform ground plane fitting δ=αx+βy+γ according to known pixel coordinates x, y and parallax value δ, and obtain plane parameters α, β, γ.
[0053] Step 3: After estimating the above parameters α, β, γ, use this parameter to further calculate the estimation of the ground plane in the camera coordinate system in the parallax space:
[0054] δ p =αx+βy+γ
[0055] Among them, x, y are the pixel coordinates in the image coordinate system, and α, β, γ are the plane paramete...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More