Semantic point cloud generation method and device based on laser radar and visual fusion
A laser radar and point cloud generation technology, applied in the direction of measurement devices, 3D image processing, electromagnetic wave re-radiation, etc., can solve problems such as error, classification label marking, semantic point cloud data semantic labeling inaccuracy, etc., to improve accuracy sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] In order to make the objectives, technical solutions and advantages of the present invention clearer, the following further describes the present invention in detail with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not used to limit the present invention.
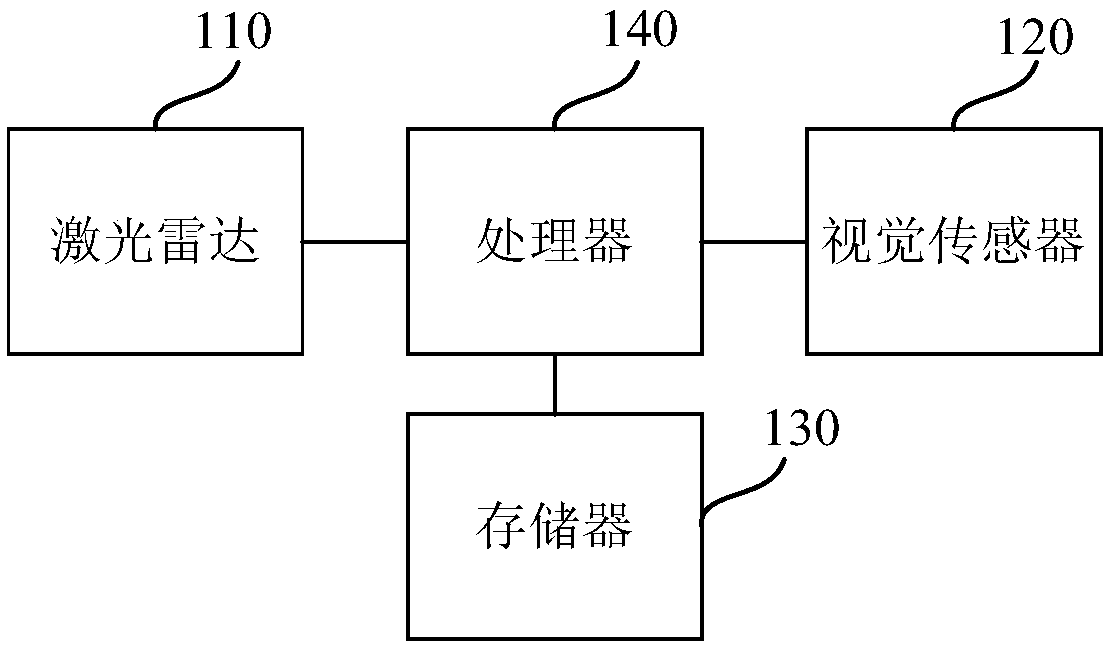
[0064] The semantic point cloud generation method based on lidar and vision fusion provided by the present invention can be applied to such as figure 1 In the object detection device shown, the object detection device includes a lidar 110, a vision sensor 120, a memory 130, and a processor 140. The lidar 110, the vision sensor 120 and the memory 130 are respectively connected to the processor 140, and the lidar 110 will detect The point cloud data is sent to the processor 140, and the vision sensor 120 sends the captured image data to the processor 140. The processor 140 executes the progr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More