Closed-loop control system and method of mechanical arm device
A technology of closed-loop control and manipulators, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as large errors, achieve the effect of reducing dependence, solving control accuracy and stability problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The inventors found that the existing control system of the mechanical arm device is a closed-loop feedback control method formed by measuring the rotation angle of each set of mechanical arm joints as the feedback amount. Since the angle error of each set of mechanical arm joints will accumulate to the end of the mechanical arm and form a Larger errors, as the number of mechanical joint arm groups increases, the errors accumulated at the end will increase geometrically.
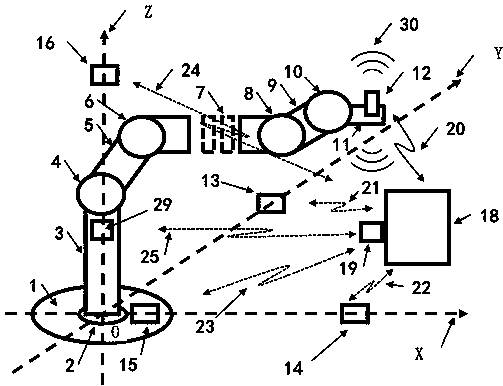
[0031] In view of the above problems, the inventor provides a closed-loop control system and method for a mechanical arm device after research. The position information of the positioning source on the load end of the manipulator is used as feedback to realize closed-loop automatic control, so that the control of each joint of the manipulator can be coordinated with each other, reducing the dependence on the control of a single joint, and can solve the change of the length of each connecting rod of the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com