

Method for tracking constant force surface of robot based on reinforcement learning
A reinforcement learning and robotics technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of rigid robot vibration, large fluctuation, and unstable contact force between the robot and the surface, achieving fast convergence speed and data utilization. high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
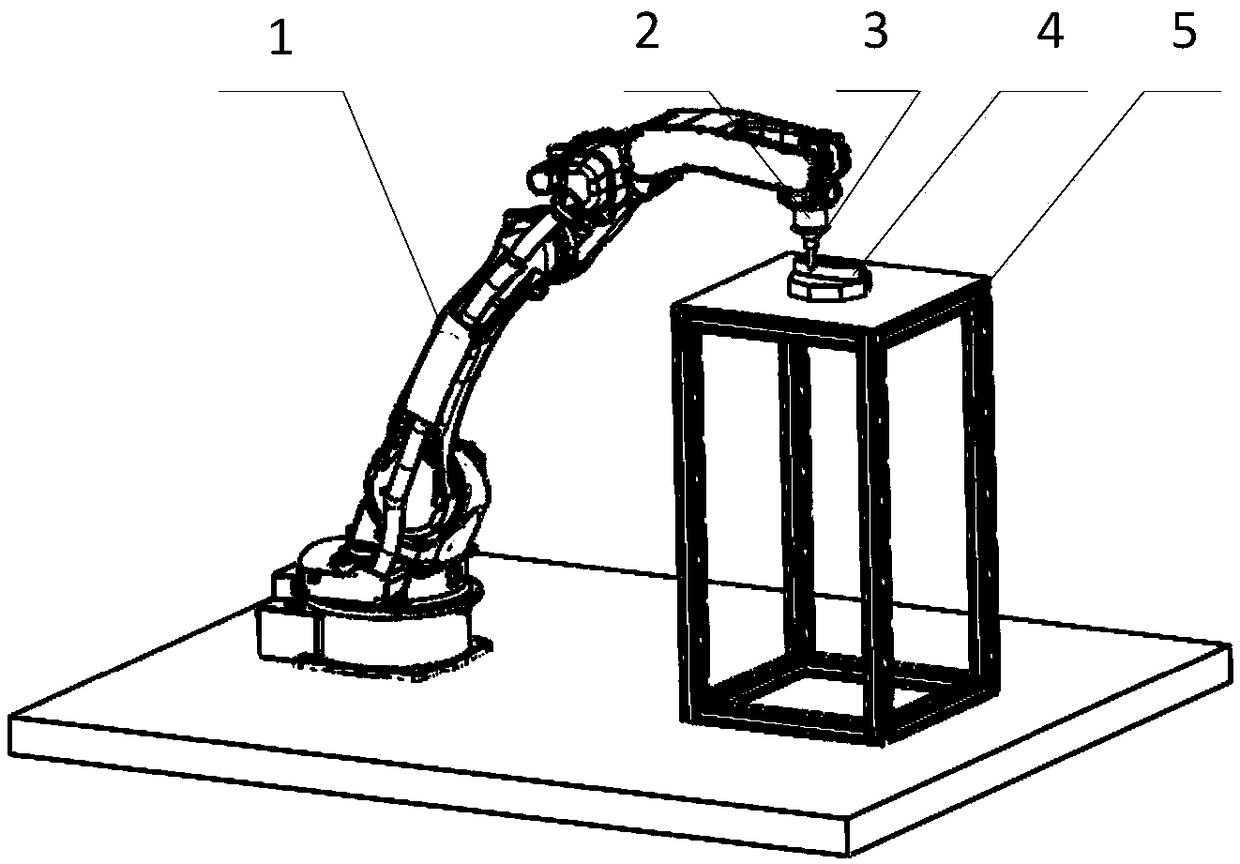
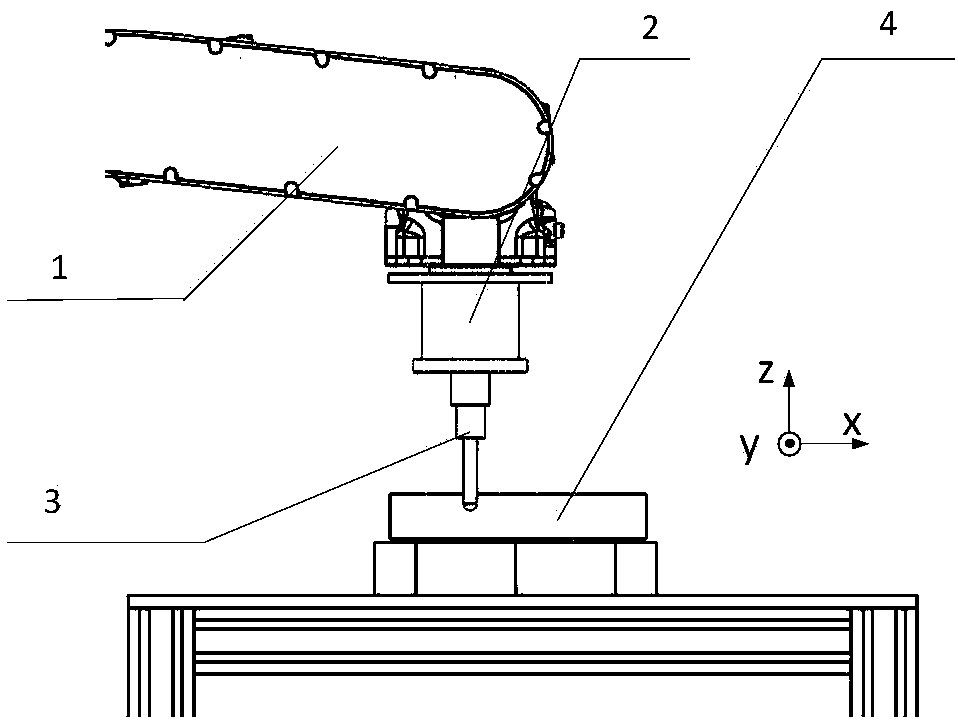
[0040] A robot constant force surface tracking method based on reinforcement learning. The method is based on a robot constant force tracking platform including a six-axis industrial robot, a workbench, a curved surface workpiece, a six-dimensional force sensor, a host computer, and a data acquisition module; Velocity moves along the x direction, and when the robot is in contact with the workpiece, it shifts along the y direction according to the magnitude of the force.
[0041] Specifically include the following steps:
[0042] (1) According to the characteristics of the 6-axis industrial robot end effector in contact with the contour of the curved surface, establish the mapping relationship between the normal force of the curved surface and the known sensor coordinate system;
[0043] (2) Design an explicit force controller to control the contact process between the robot and the curved surface;
[0044] (3) Optimize the parameters of the controller (such as the PID paramet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More