

Route planning method, device, server and storage medium
A path planning and path technology, which is applied to measurement devices, instruments, road network navigators, etc., can solve the problems of increasing computing time and reducing the overall efficiency of path planning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
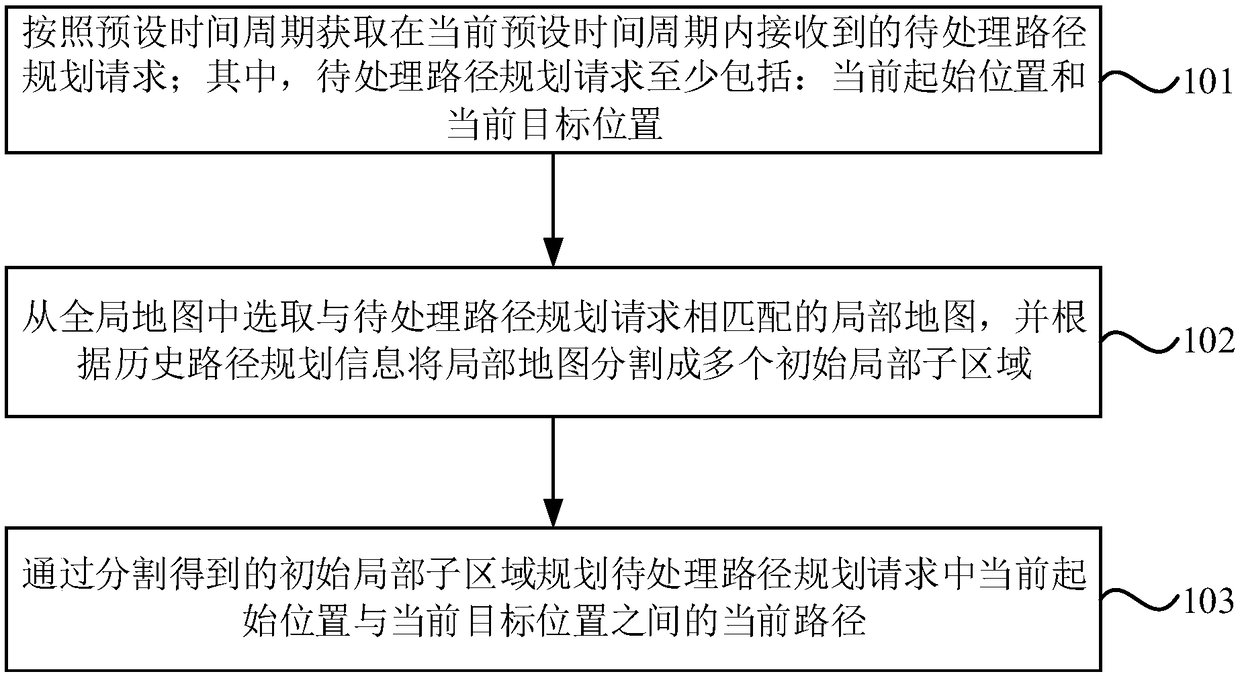
[0038] figure 1 It shows a schematic flowchart of a path planning method provided by Embodiment 1 of the present invention. The embodiment of the present invention can be applied to the situation of responding to a path planning request for path planning. The method can be executed by a path planning device, which can use software and / or hardware, and the device can be integrated in any server that has a network communication function for path planning.
[0039] like figure 1 As shown, the path planning method provided in the embodiment of the present invention may include:
[0040] Step 101. Obtain the pending route planning request received within the current preset time period according to the preset time period; wherein, the pending route planning request includes at least: a current starting location and a current target location.
[0041] When performing path planning, the server performs map layering according to each pending path planning request, calculates the smal...
Embodiment 2
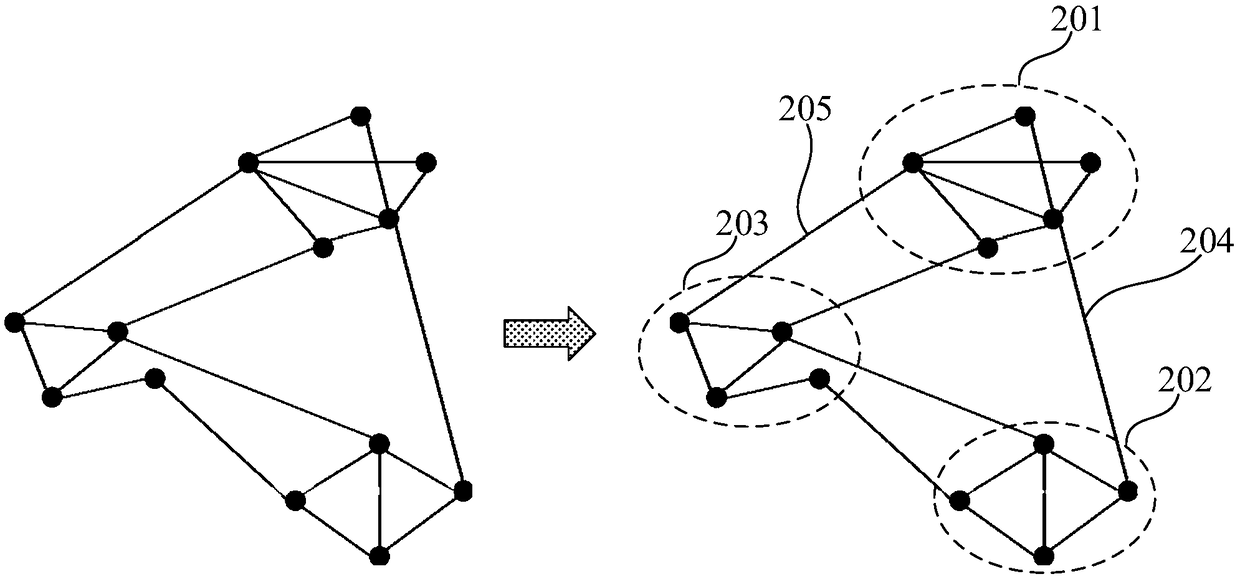
[0061] Figure 4A schematic flowchart of a path planning method provided by Embodiment 2 of the present invention is shown, and this Embodiment 2 is optimized on the basis of the foregoing embodiments. In this embodiment, the step of dividing the local map into a plurality of initial local sub-regions according to historical route planning information is further optimized.
[0062] like Figure 4 As shown, the path planning method provided in the embodiment of the present invention may include:
[0063] Step 401: Obtain the pending route planning request received within the current preset time period according to the preset time period; wherein, the pending route planning request at least includes: the current starting location and the current target location.
[0064] Step 402. Select a local map from the global map that matches the path planning request to be processed.
[0065] Optionally, selecting a local map from the global map that matches the path planning request t...
Embodiment 3
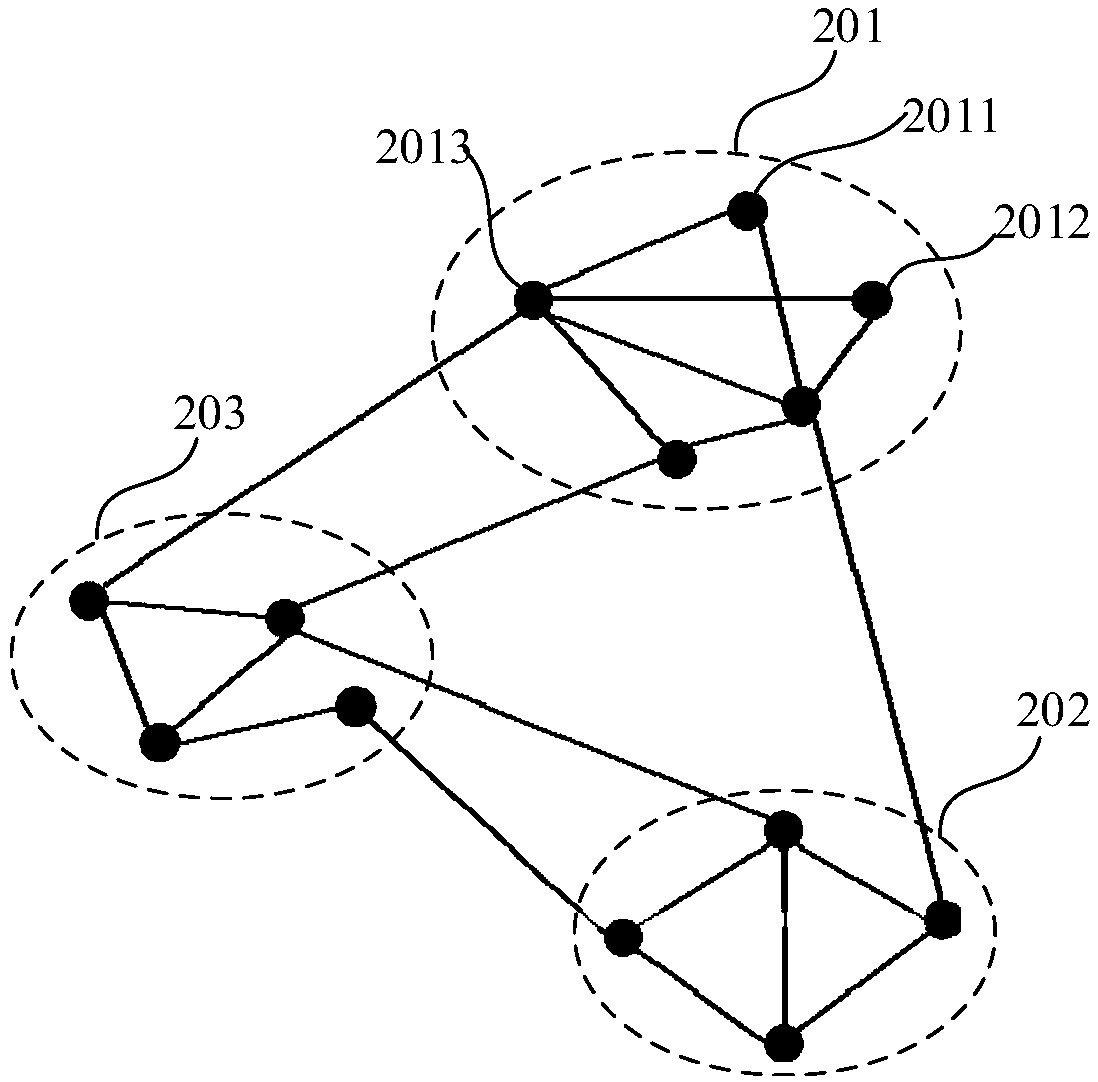
[0083] Figure 5 A schematic flowchart of a path planning method provided by Embodiment 3 of the present invention is shown, and Embodiment 3 is optimized on the basis of the foregoing embodiments. In this embodiment, the step of planning the current path between the current starting position and the current target position in the pending path planning request for the initial local sub-area obtained through segmentation is further optimized.
[0084] like Figure 5 As shown, the path planning method provided in the embodiment of the present invention may include:
[0085] Step 501. Obtain the pending route planning request received within the current preset time period according to the preset time period; wherein, the pending route planning request at least includes: the current starting location and the current target location.
[0086] Step 502: Select a local map from the global map that matches the route planning request to be processed, and divide the local map into mul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More