Multi-functional motion auxiliary robot for sitting, standing and traveling
A robotic and multi-functional technology, applied in passive exercise equipment, equipment to help people walk, medical transportation, etc., can solve the problems of complex structure, single training function, large space occupation, etc., to achieve simple operation, improve training effect, Realize the effect of multi-functional switching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The detailed content of the present invention and its specific implementation will be further described below in conjunction with the accompanying drawings.
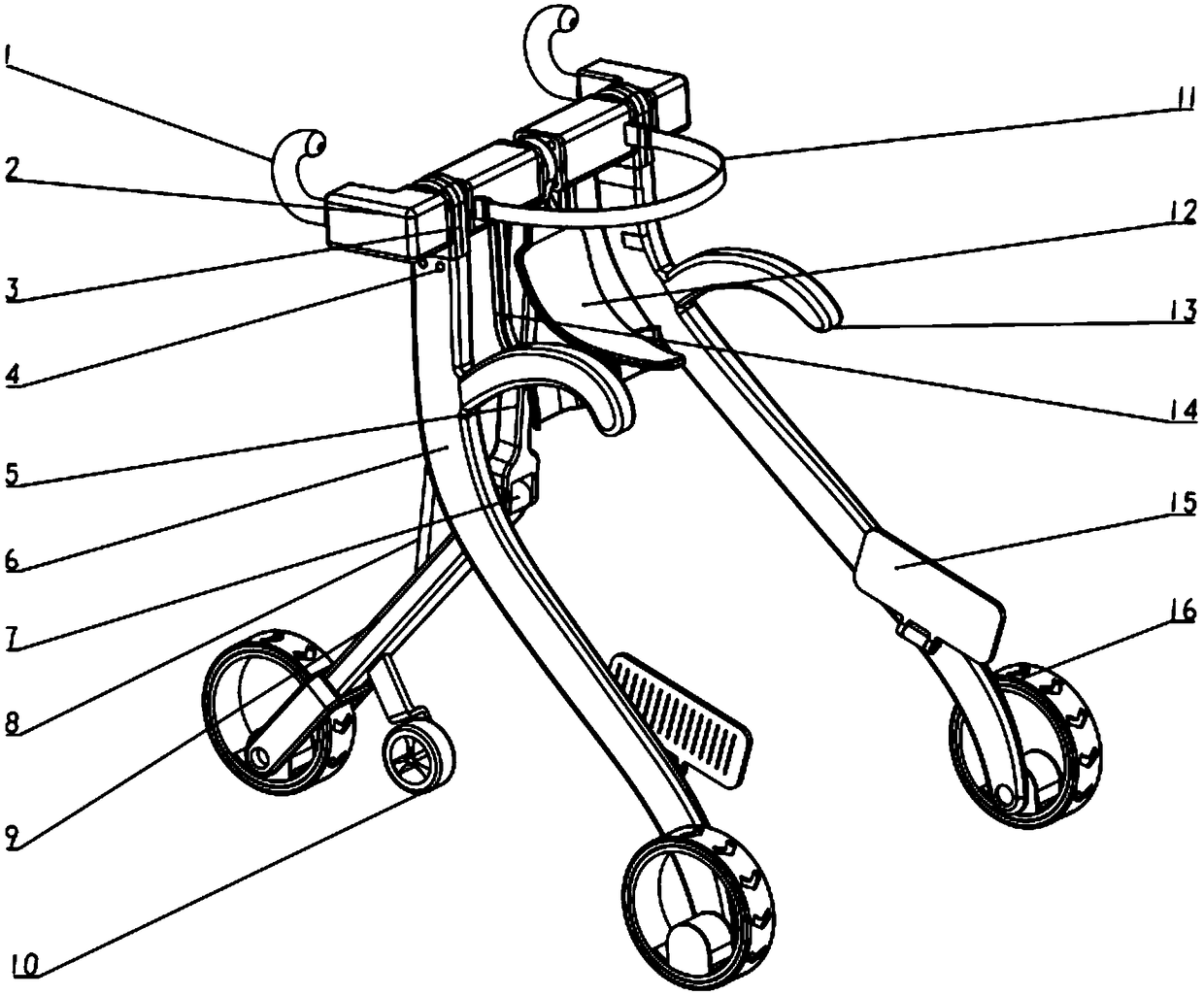
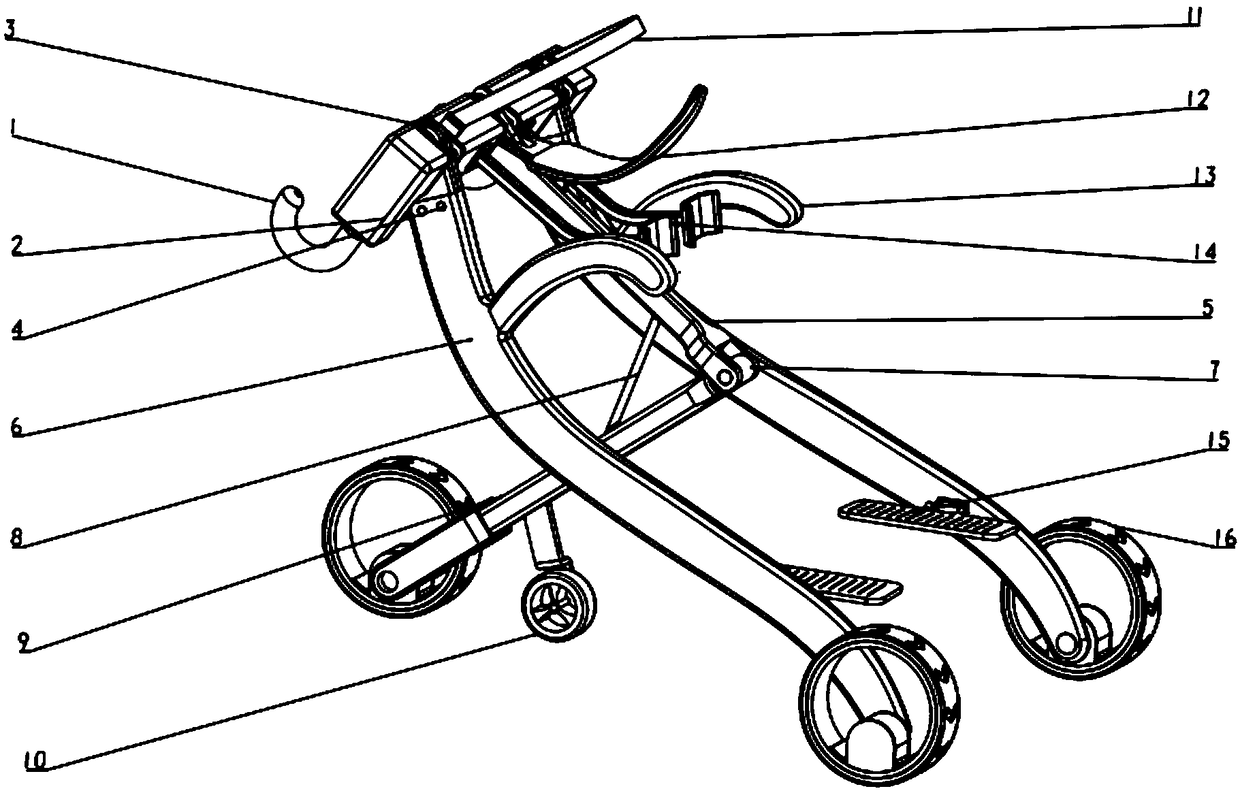
[0044] like figure 1 and figure 2 As shown, the sitting-stand-walking multifunctional motion-assisted robot includes a pusher 1, an axle control box 2, a front strut shaft firmware 3, a No. 1 bolt 4, a rear strut upper arm 5, a front strut 6, an attitude adjustment motor 7, a Position strut 8, rear strut lower arm 9, support wheel 10, belt 11, saddle 12, handrail 13, gait shift lever 14, pedal 15, three driving wheels 16. Wherein, the sitting-stand-walking multifunctional motion auxiliary robot realizes movement through three driving wheels 16 . The front two driving wheels 16 can rotate at the same speed. Through the differential speed with the rear driving wheel 16, the opening and closing movement of the front strut 6 and the rear strut upper arm 5 of the auxiliary robot in the sagittal plane can be realized...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com