Hyper-redundant snakelike robot driving device
A snake-like robot and driving device technology, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of large diameter of the driving device, inability to miniaturize, and inconvenient flexible use and transportation of products. The effect of simplicity, size reduction, and ease of installation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
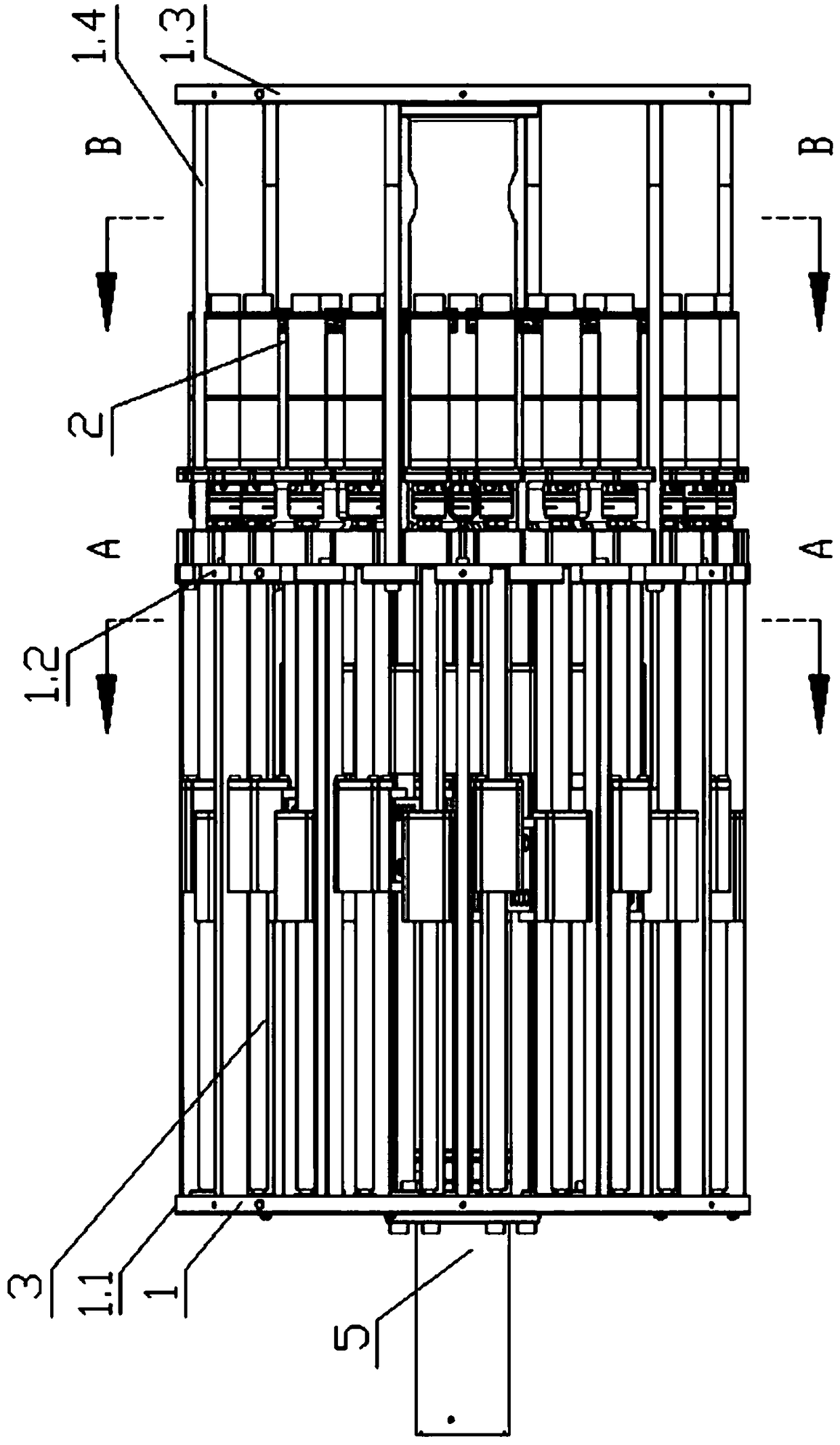
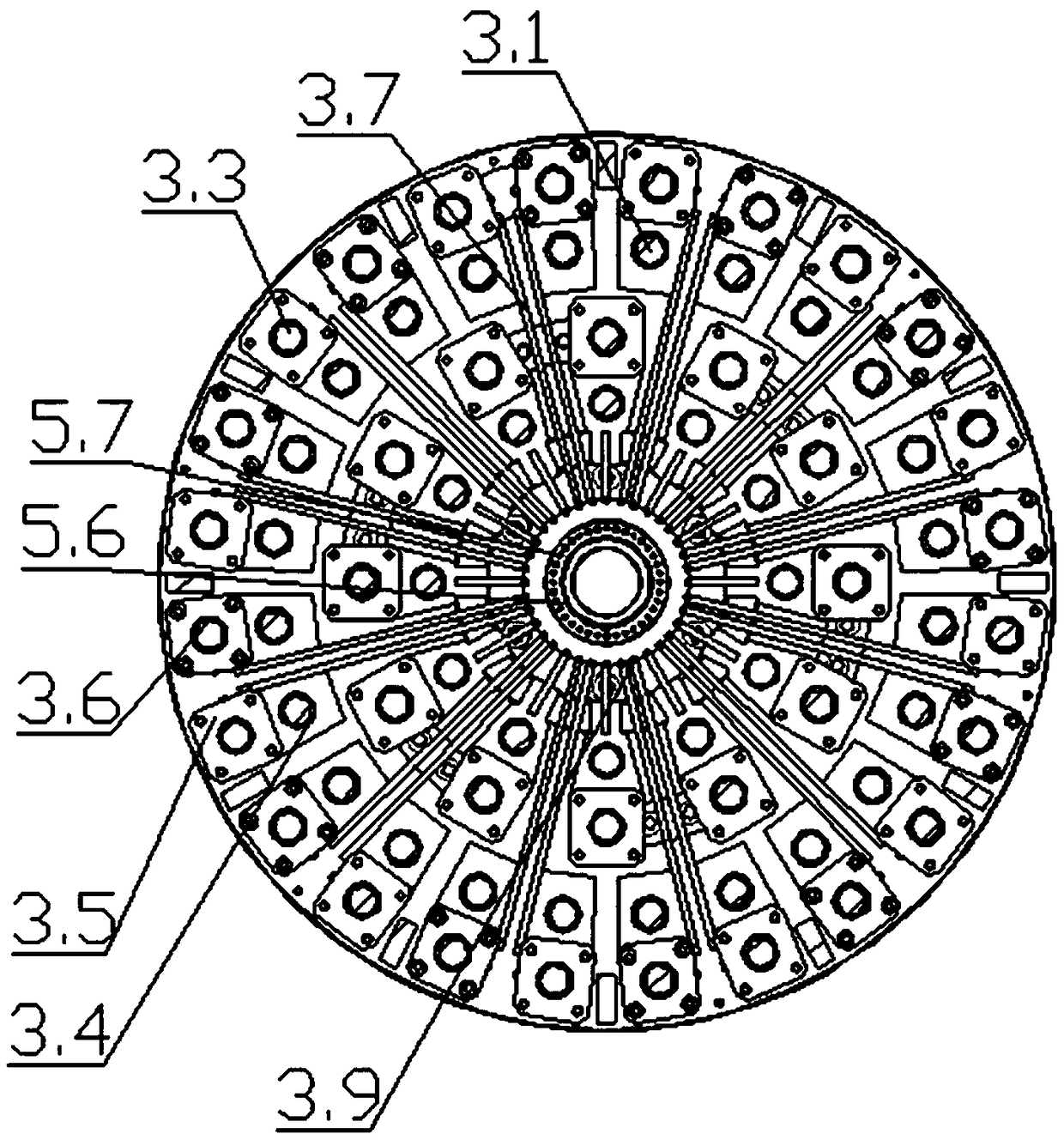
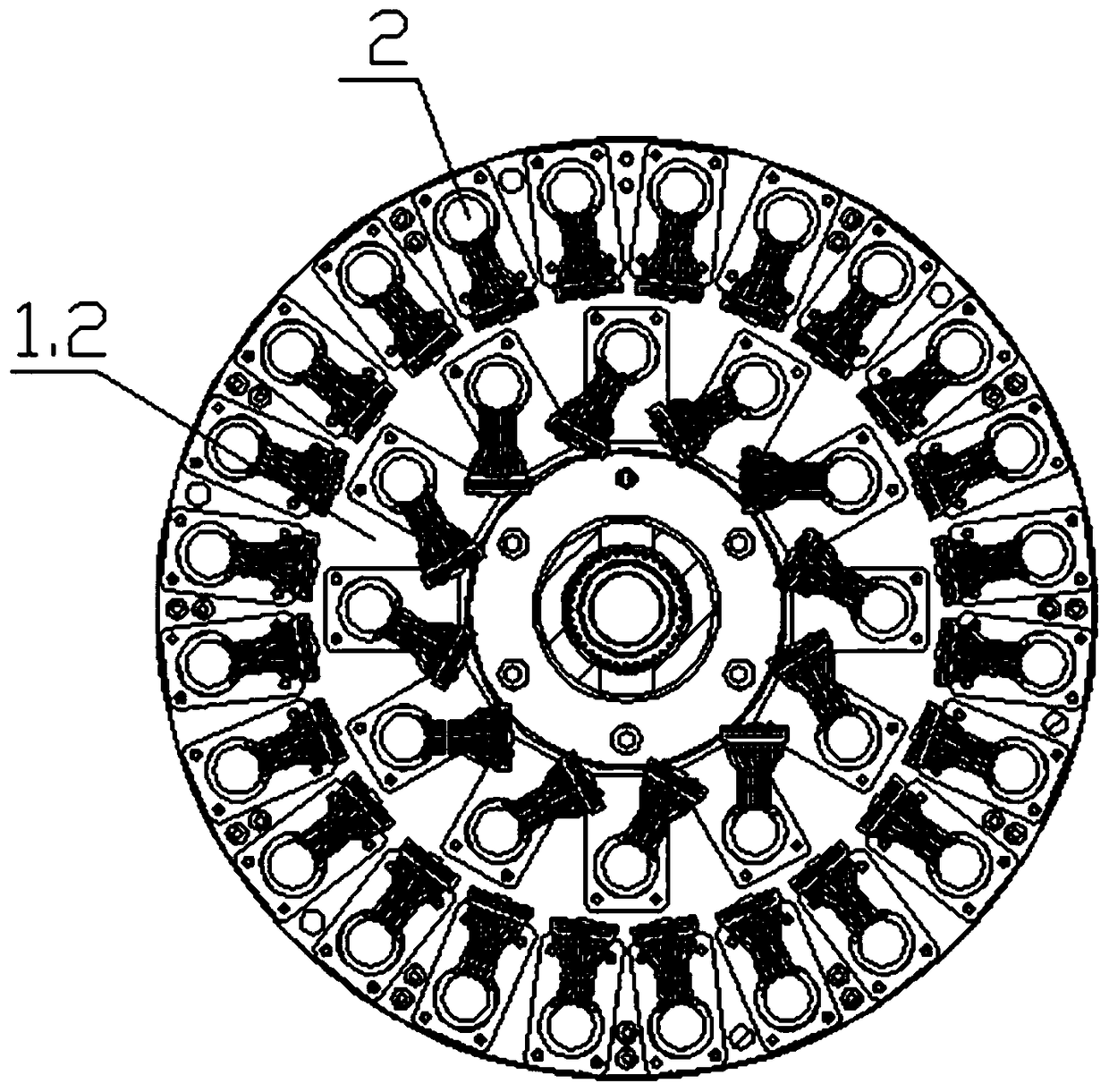
[0033] Such as figure 1 , 4 As shown, in this embodiment, the driving device of the super-redundant snake robot includes a structural frame 1 and n sets of driving assemblies, where n=36. Each group of driving components includes a driving motor 2 and a group of transmission devices 3 . The driving motor 2 is installed on the structural frame 1 . The output end of each drive motor 2 is respectively driven and connected to the corresponding transmission device 3 .
[0034] The structural frame 1 comprises a disk-shaped front base 1.1, a middle base 1.2 and a rear base 1.3 arranged concentrically at intervals. The front base 1.1 is connected to the middle base 1.2 through the first connecting rod, and the middle base is connected to the rear base 1.3 through the second connecting rod 1.4, so that the structural frame 1 is connected as a whole. The ce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More