Robot intelligent obstacle avoidance system and method based on stereoscopic vision
A robot intelligence and stereo vision technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of low positioning accuracy, low accuracy of identifying obstacles, and inability to meet requirements, and achieves the requirements of overcoming the application environment, The effect of reducing the influence of ambient lighting and directly enriching image information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] Specific examples of the present invention are given below. The specific embodiments are only used to further describe the present invention in detail, and do not limit the protection scope of the claims of the present application.
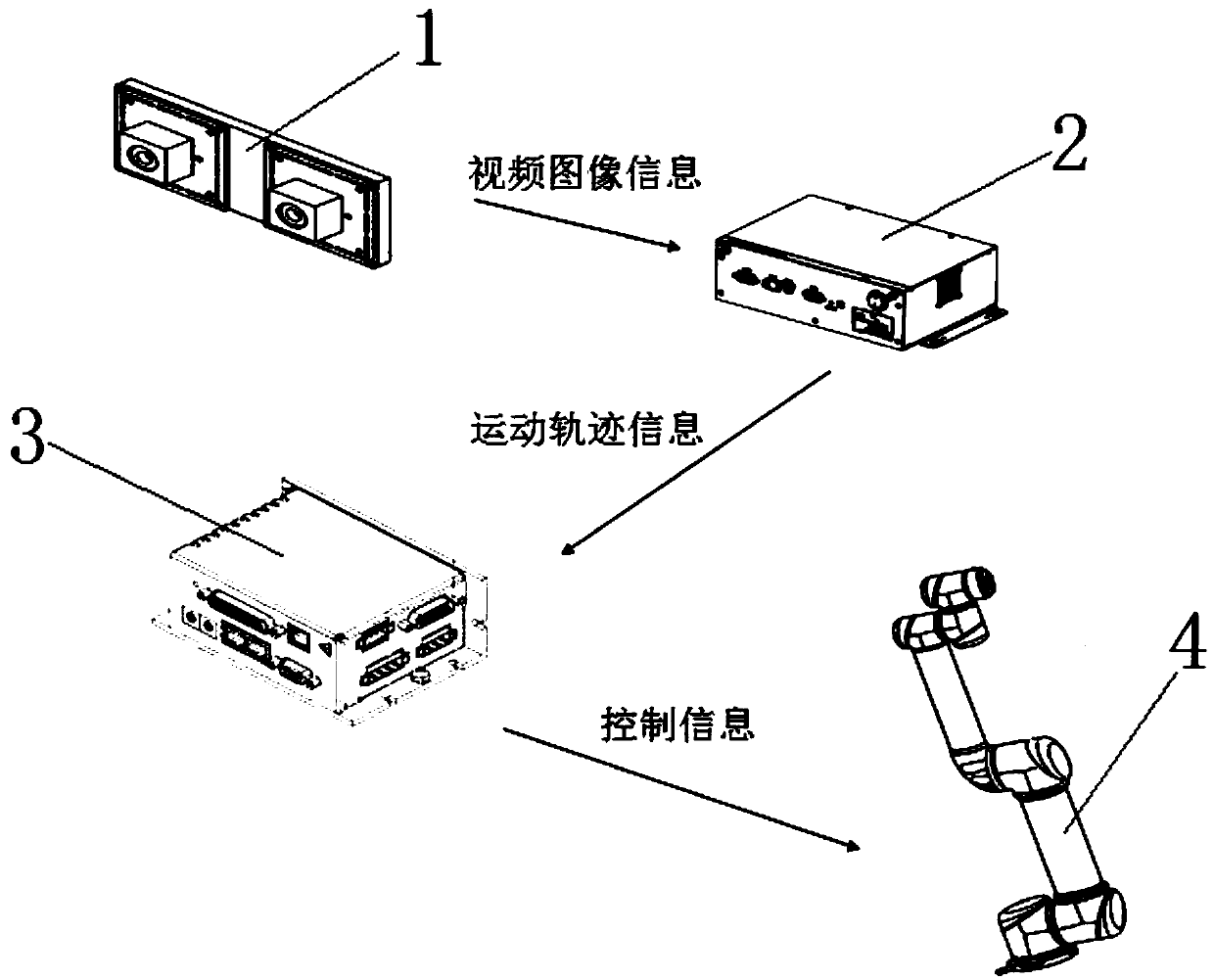
[0022] The invention provides a robot intelligent obstacle avoidance system (referred to as the system, see figure 1 ), it is characterized in that the system includes a binocular camera 1, an industrial computer 2 and a driver 3; the industrial computer 2 is connected to the binocular camera 1 and the driver 3 respectively; specifically, the binocular camera 1 is connected to the industrial computer through a USB line 2, and the industrial computer 2 is connected to the driver 3 through a serial line (CAN line).
[0023] The binocular camera 1 is composed of two cameras on the left and right, and is used to collect video image information in the working area of the robot and send it to the industrial computer 2;
[0024] The industrial...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com