

Line-driven robotic fish
A robotic fish and wire-driven technology, applied in the field of bionic robots, can solve the problems of difficult assembly, inconvenient research and application, and increased fish body mass, and achieve the effect of reducing overall weight and simple joint structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
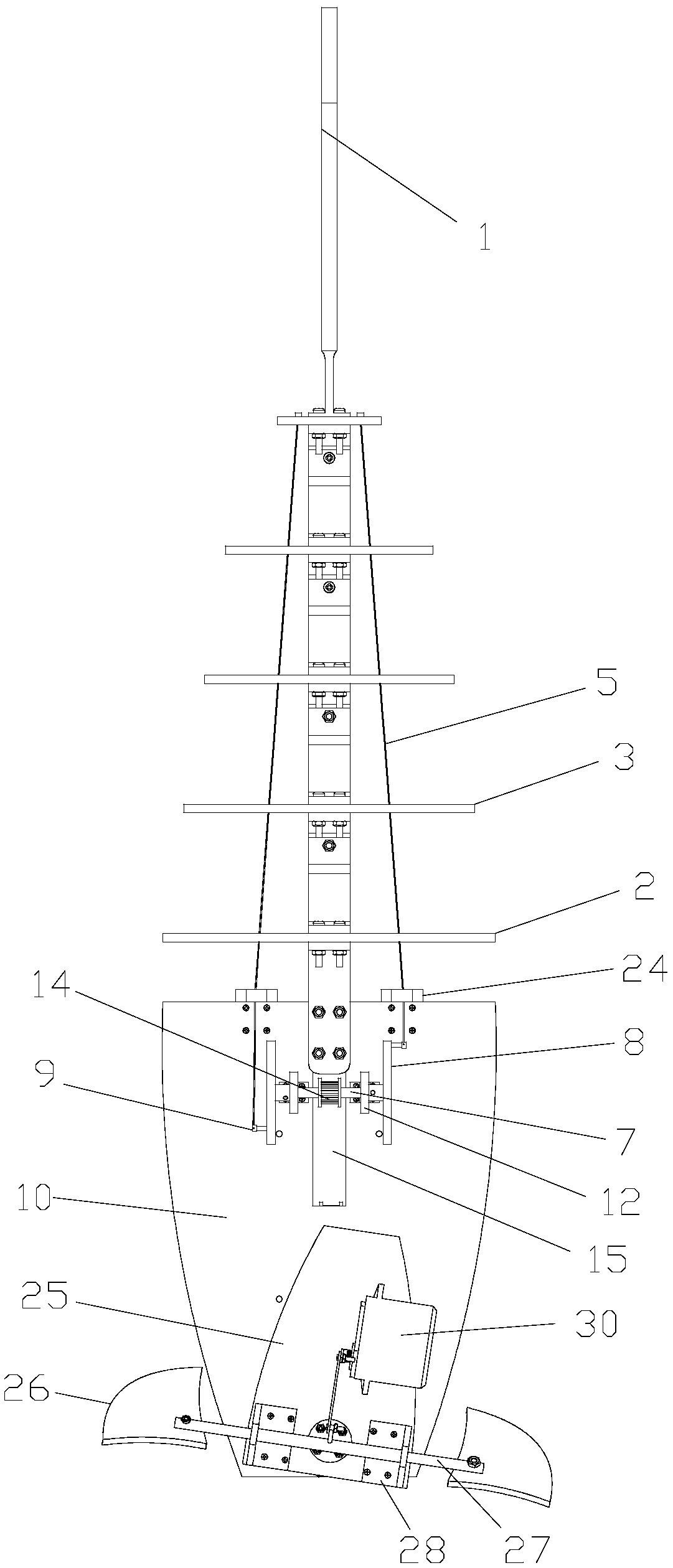
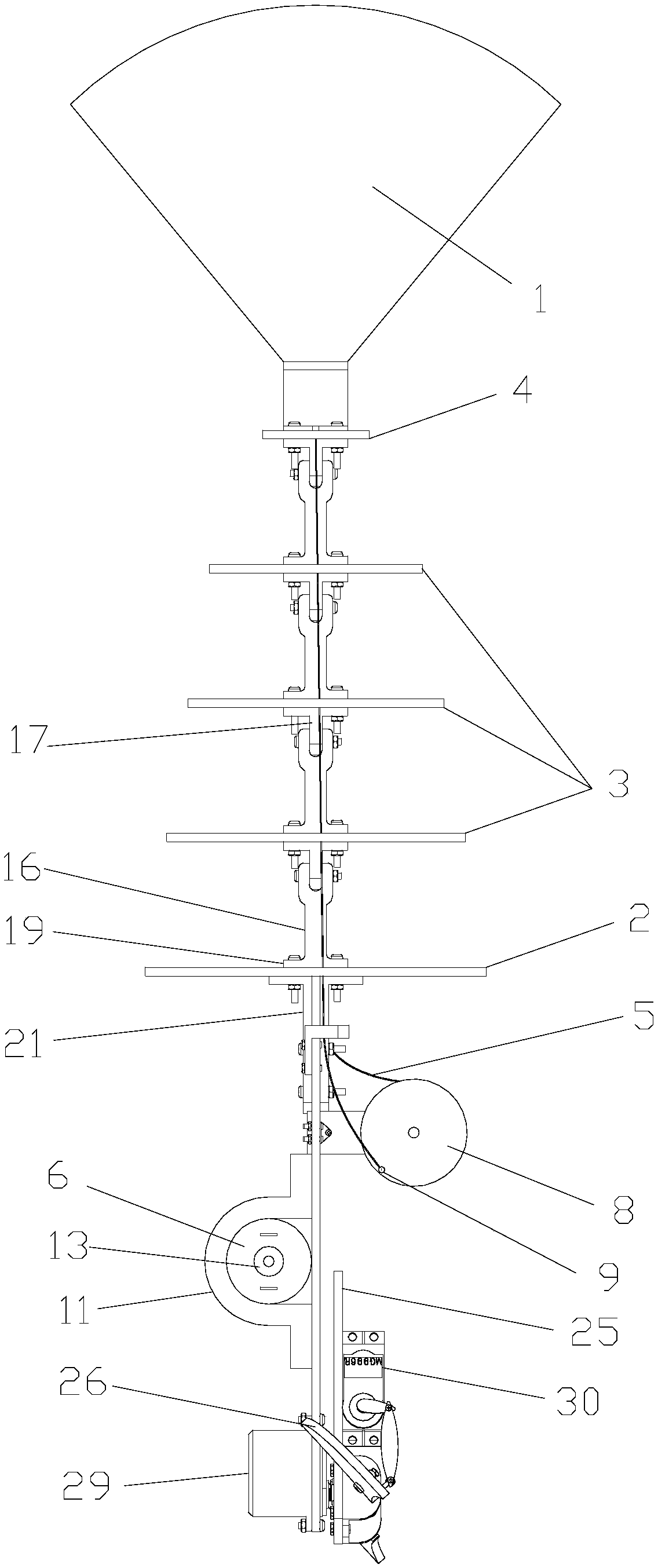
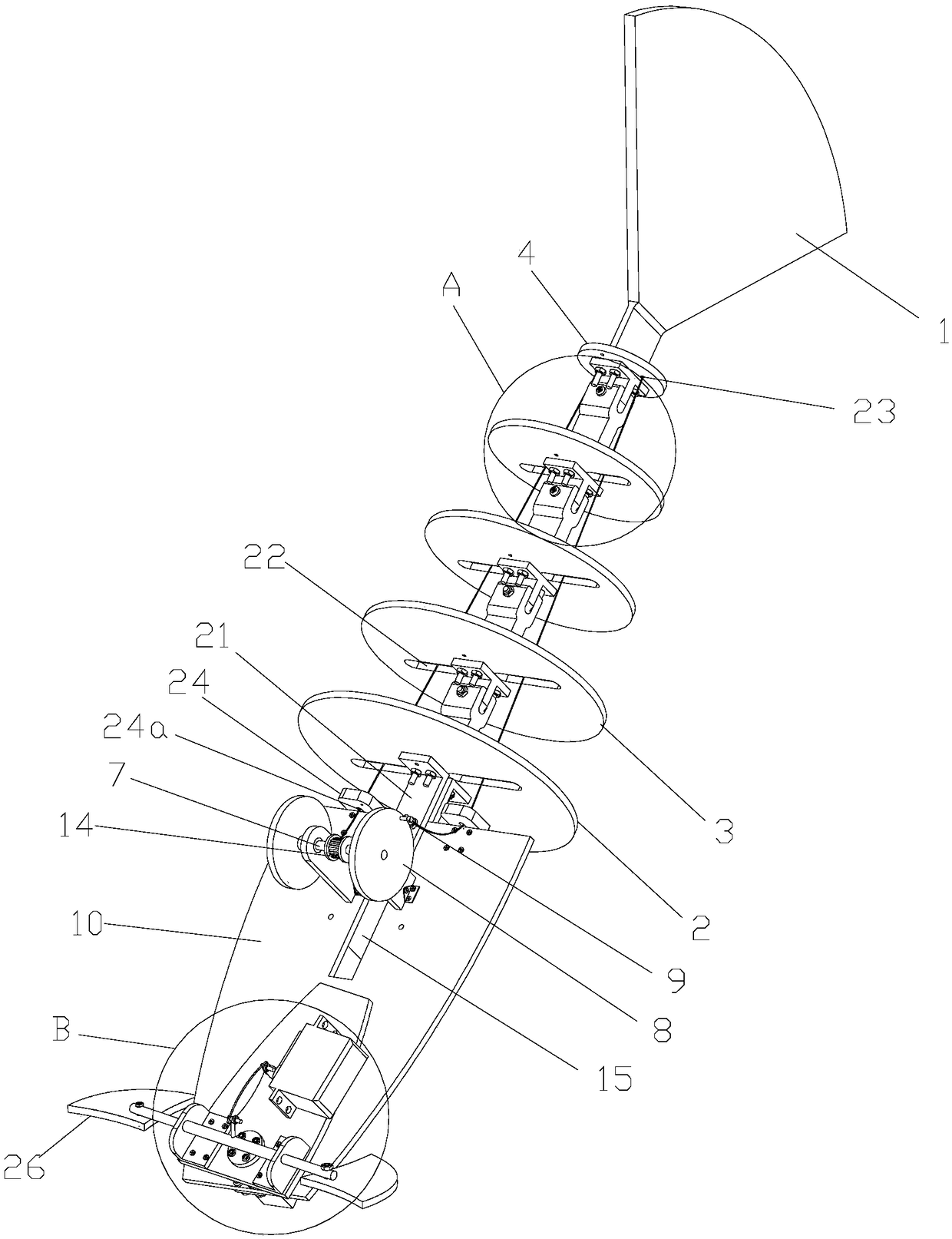
[0024] Such as Figure 1 to Figure 5 Shown: the wire-driven robotic fish of this embodiment includes fish head, fish body and fish tail connected in sequence, the fish tail includes caudal fin 1 and a support plate assembly, and the support plate assembly is sequentially connected from front to back One support plate I2, at least one support plate II3 and one support plate III4, the front side of the support plate I2 is fixedly connected to the fish body, the rear side of the support plate III4 is fixedly connected to the tail fin 1, the support plate I2 It is connected with the support plate II3, between the adjacent support plates II3 and between the support plate II3 and the support plate III4 through joint components;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More