

Indoor scene recognition method based on SVM and reinforcement learning
An indoor scene, reinforcement learning technology, applied in the field of indoor scene recognition, can solve problems such as huge workload, and achieve the effect of improving the accuracy rate and reducing the amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to deepen the understanding of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. This embodiment is only used to explain the present invention and does not limit the protection scope of the present invention.
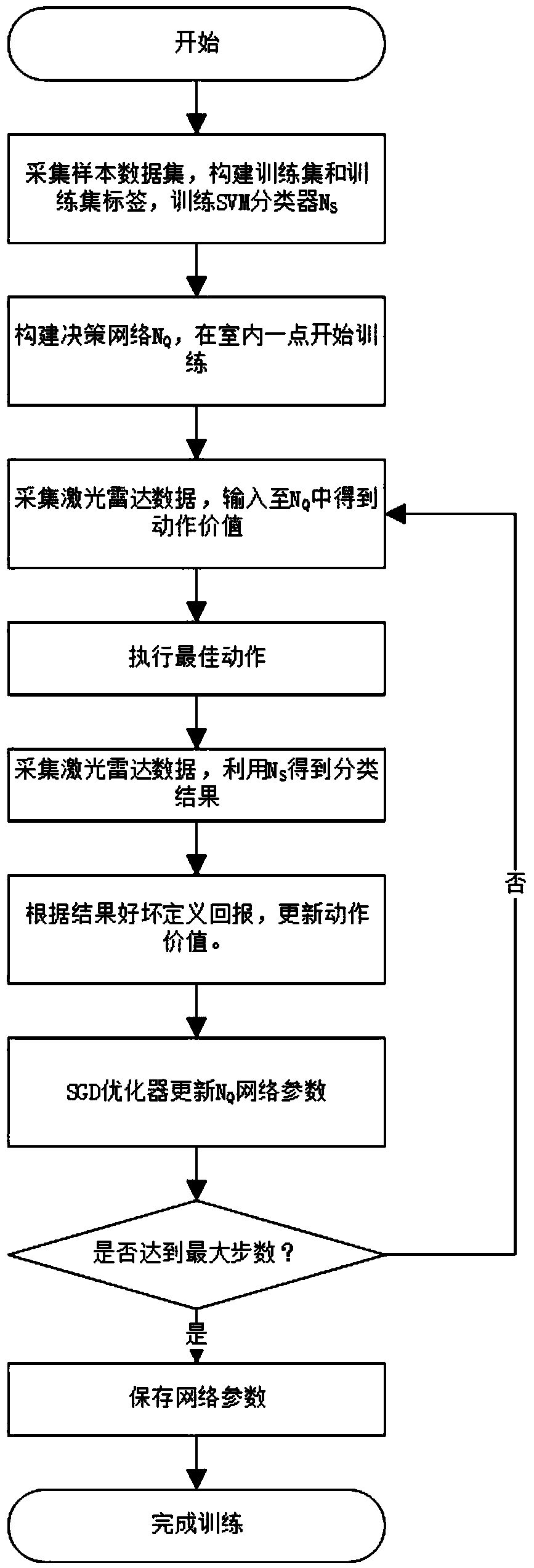
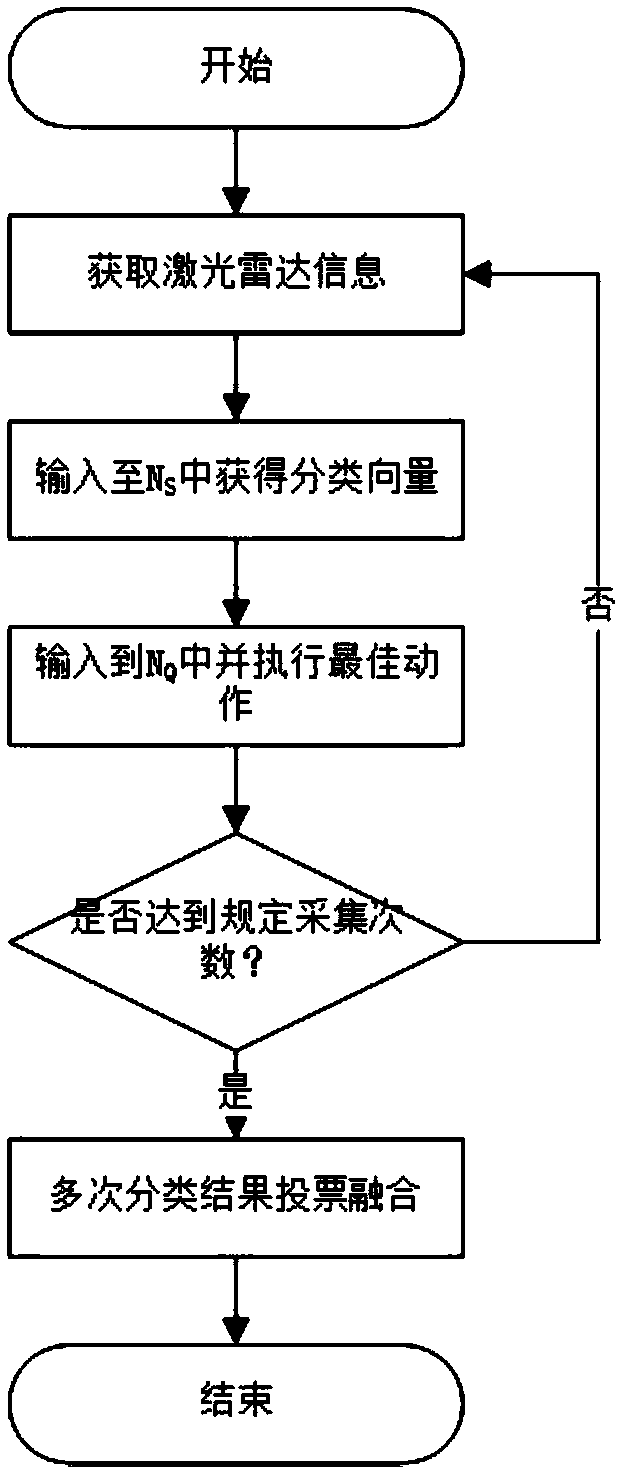
[0051] This embodiment proposes an indoor scene recognition method based on SVM and reinforcement learning, the method includes the following steps:
[0052] (1) Indoor scene collection data, training a SVM classifier N capable of indoor scene classification s , assuming that there are four types of scenarios, respectively set to 1, 2, 3, 4, the specific steps are as follows:
[0053] (1-1) Collect lidar data in indoor scenes and name it as data set D. The specific steps are as follows:
[0054] (1-1-1) Set multiple collection points for each indoor scene, collect data, including data and tags, and the tags are room categories, which are 1, 2, 3, and 4 re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More