

Wearable blind assist robot mechanism accord with ergonomic
A technology of ergonomics and robotics, applied in the direction of devices to help people walk, physical therapy, etc., can solve the problems of limiting the mobility and range of activities of the blind, poor adaptability, single function, etc., to overcome the low reliability of human-computer interaction , Load distribution is uniform, and the effect of improving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The following figures will further illustrate the present invention in conjunction with the accompanying drawings.
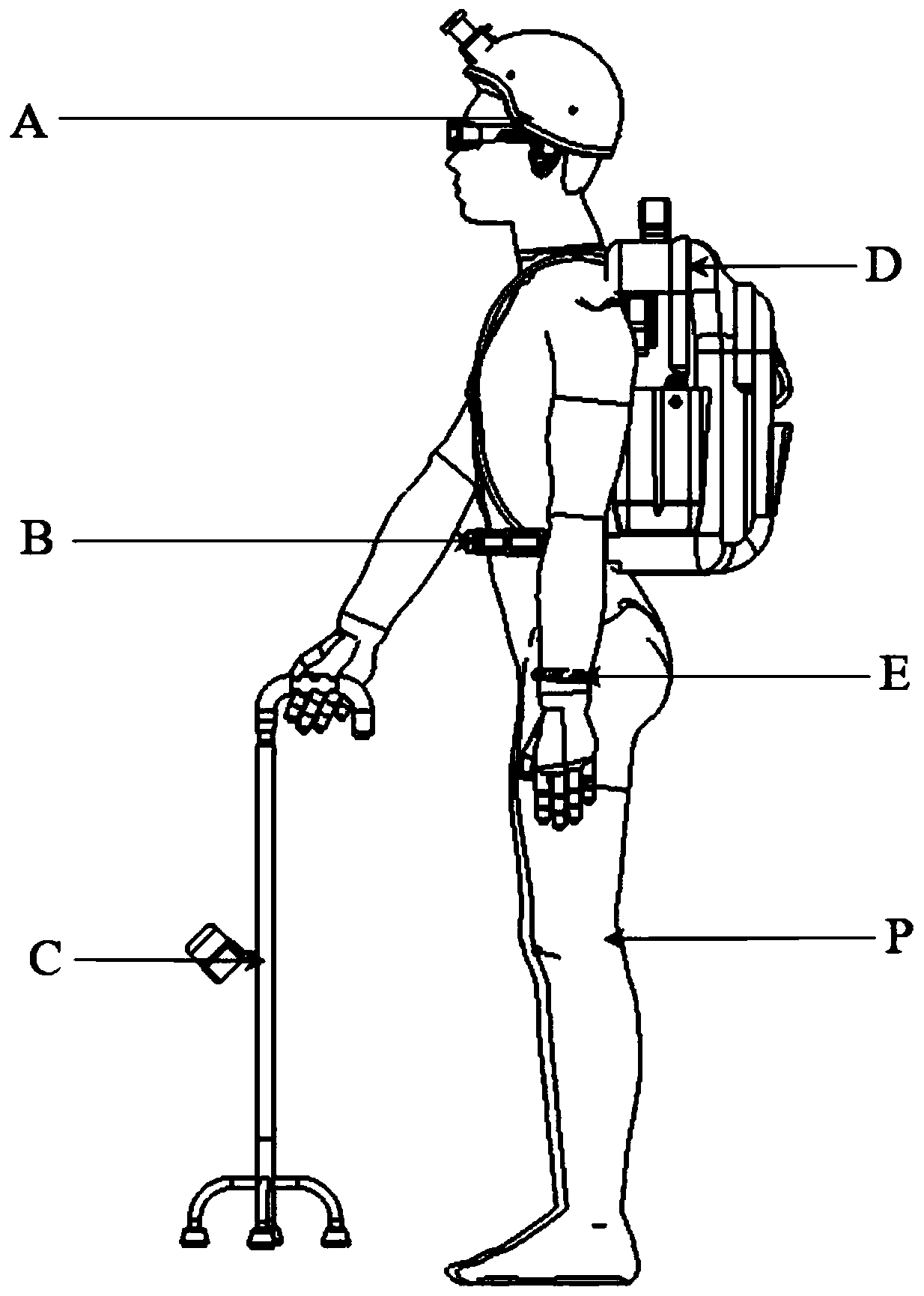
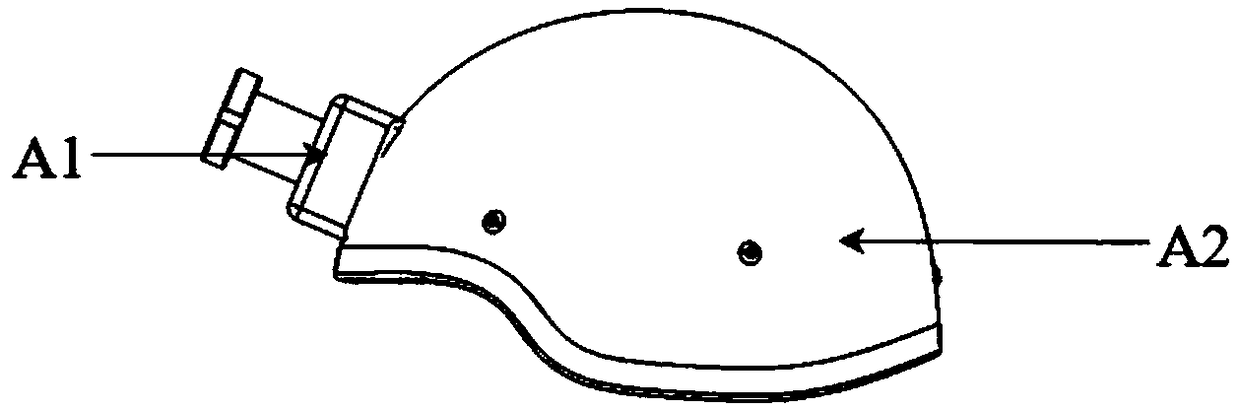
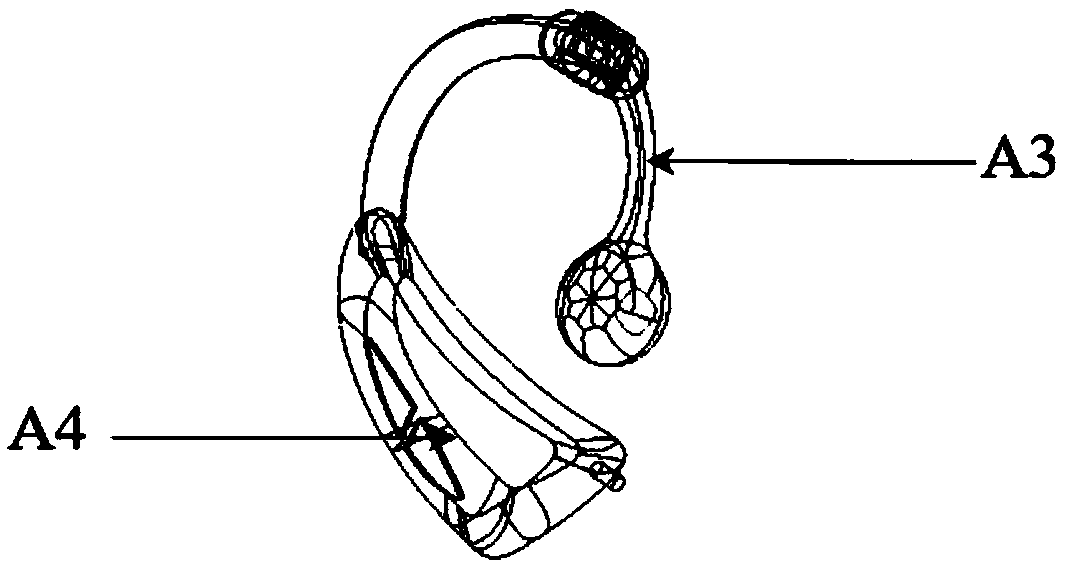
[0025] see figure 1 , the invention provides an ergonomic wearable blind-assisting robot mechanism. Including head wearable structure A, multifunctional belt B, multifunctional blind stick C, energy supply and calculation structure D and vibration interaction bracelet E; head wearable structure A, multifunctional belt B, multifunctional blind stick C, The energy supply and calculation structure D and the vibration interaction bracelet E are both worn on the human body model P, the head wearable structure A is worn on the head of the human body model P, the multifunctional belt B is worn on the waist of the human body model P, and the multifunctional blind The stick C is worn on the hand of the human body model P, the energy supply and computing structure D is worn on the back of the human body model P, and the vibration interaction bracelet E is worn on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More