

Distributed mobile mechanical arm task layered optimization control method based on generalized coordinates
A technology of moving manipulators and generalized coordinates, which is applied in the field of hierarchical optimization control of distributed mobile manipulator tasks, can solve the problems of large computing burden, redundancy sacrifice of main task occupation, etc., to reduce computing burden and system communication burden , strong invulnerability and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be described in detail below with reference to the accompanying drawings and examples.
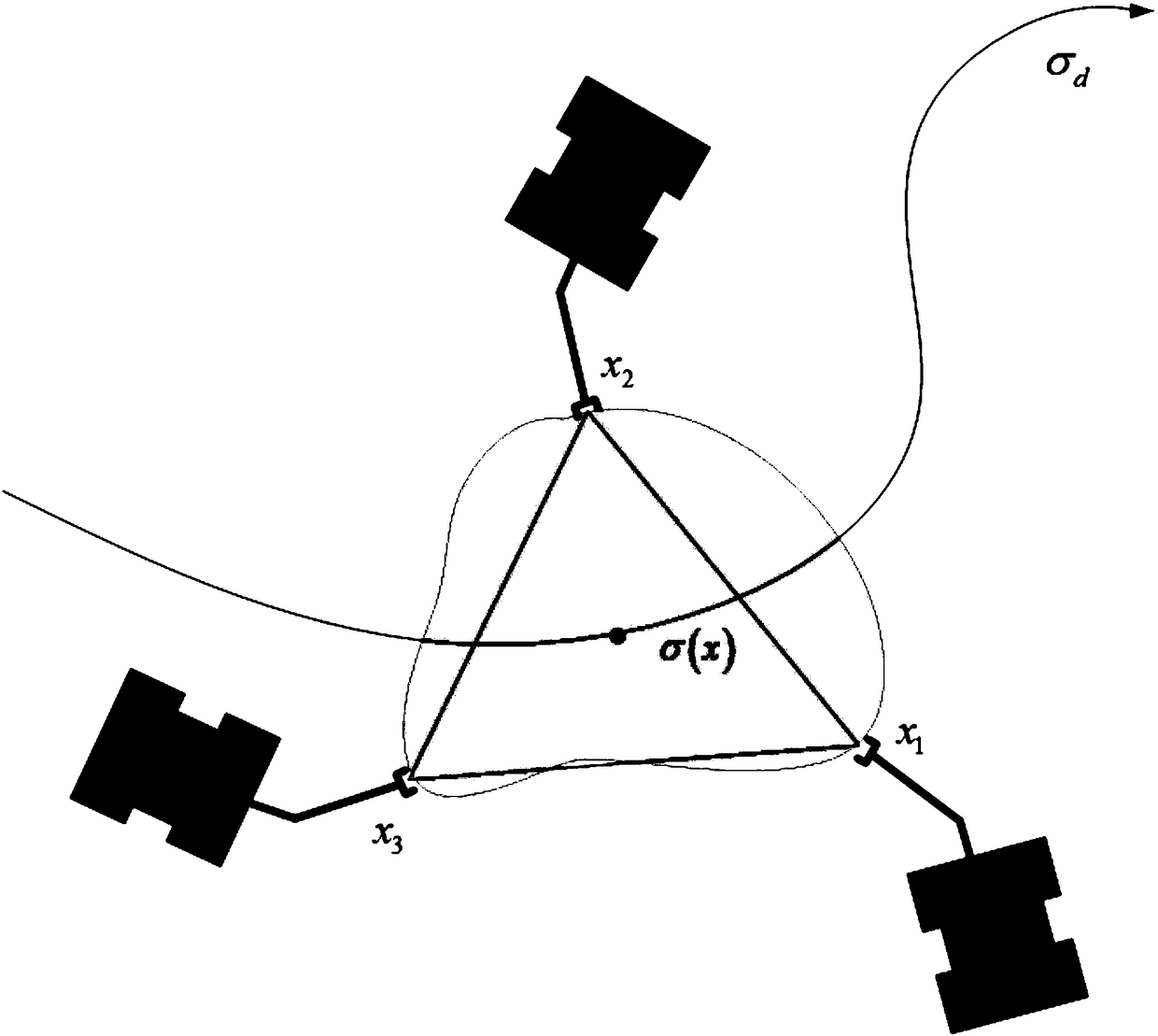
[0038] In this example, the mobile manipulator is formed by fixing the manipulator on the mobile base. The object to be transported is an object of a given shape. The collaborative control task can be divided into primary and secondary tasks according to the task priority. The main task is to execute multiple mobile manipulators through the end. The robot cooperates to carry the target object so that the center of the target object tracks a given reference trajectory. The secondary task is to control the joint posture and move the base to keep the sum of the operation degrees of all robotic arms at a large value and move the base to switch formations to adapt to complex obstacles. environment.
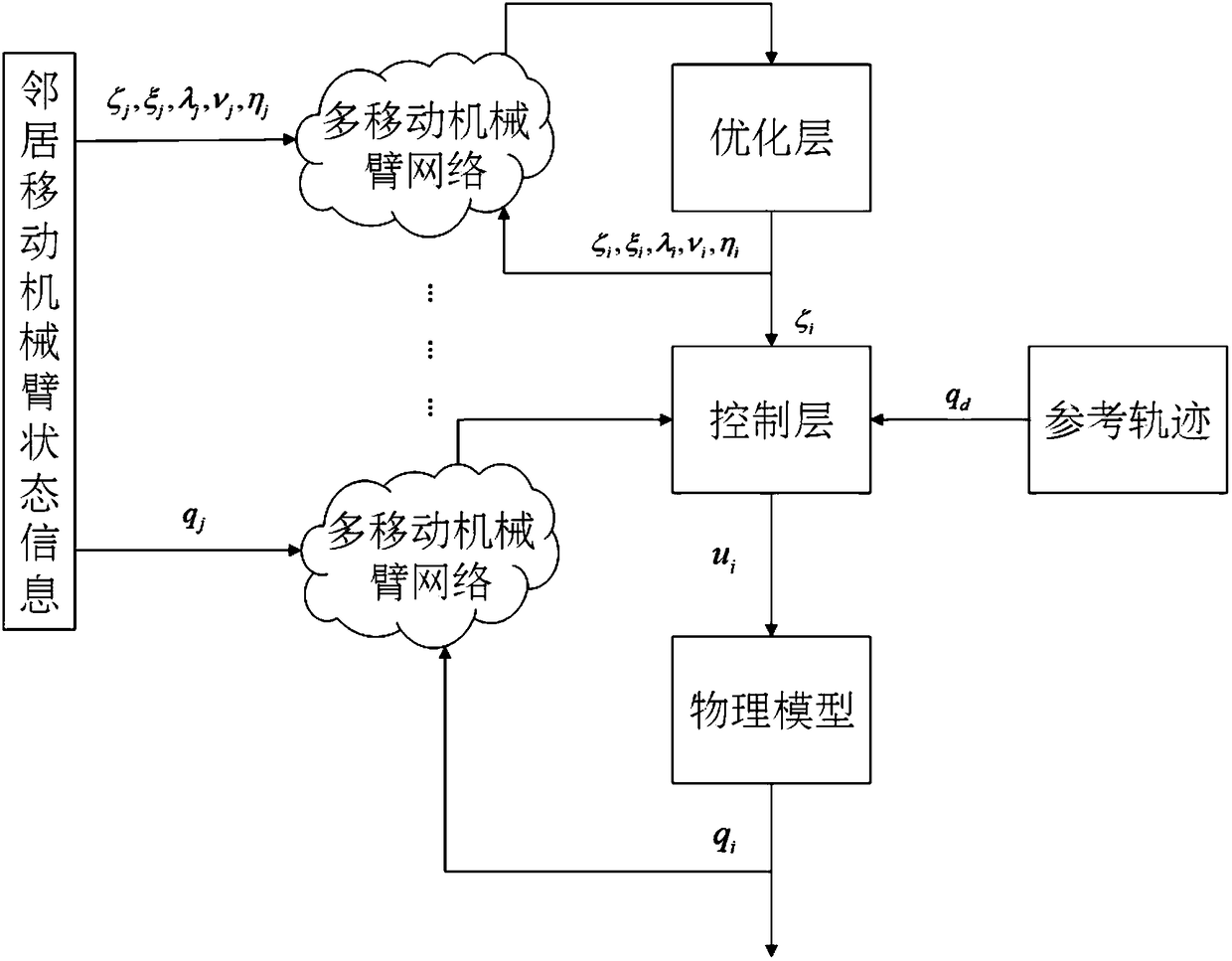
[0039]The present invention provides a distributed mobile manipulator task layered optimization control method based on generalized coordinates. The position of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More