

Particle filter positioning and map construction method based on adaptive genetic algorithm
A genetic algorithm and particle filter technology, applied in the field of particle filter positioning and map construction based on adaptive genetic algorithm, can solve problems such as particle exhaustion, and achieve the effects of improving accuracy, protecting diversity, and improving operating efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0101] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
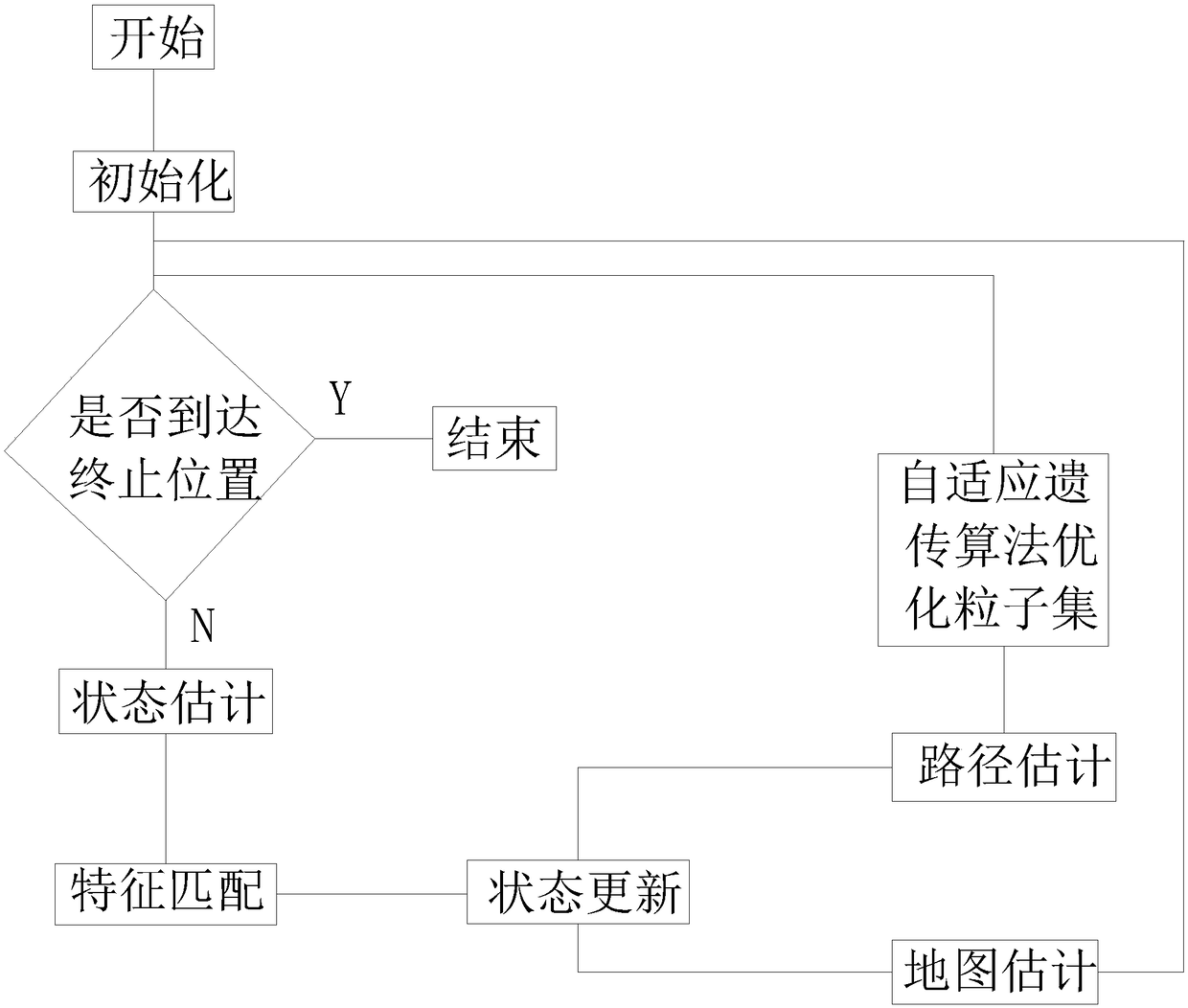
[0102] Such as figure 1 As shown, the particle filter positioning and map construction method based on adaptive genetic algorithm of the present invention comprises the following steps:
[0103] Step 1: Initialization: set the initial position and end position of the robot movement;
[0104] Step 2: Judgment: During the movement of the robot from the initial position to the end position, judge whether the current position of the robot has reached the end position. If it reaches the end position, the robot will stop moving;
[0105] Step 3: State estimation: If the end position is not reached, use the unscented Kalman filter algorithm to calculate the proposed distribution of the pose of each particle at k-1 time;
[0106] Step 3: Feature matching: Obtain the actual observation value of the robot on the environmental characteristics at time k, and use ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More