

Quadruped robot body posture control method and quadruped robot body posture control device
A quadruped robot and fuselage technology, applied in the field of robotics, can solve problems affecting the stability of quadruped robot motion, poor real-time performance, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0063] According to an embodiment of the present invention, an embodiment of a body posture control method of a quadruped robot is provided. It should be noted that the steps shown in the flow chart of the accompanying drawings can be implemented in a computer system such as a set of computer-executable instructions and, although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
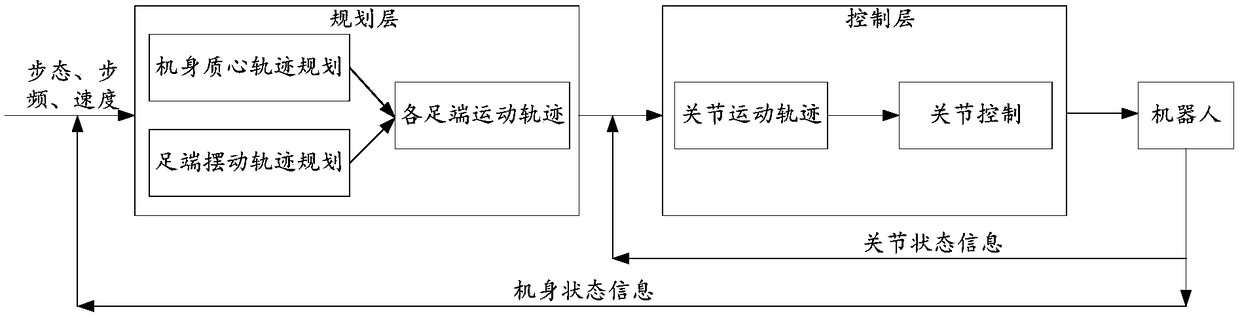
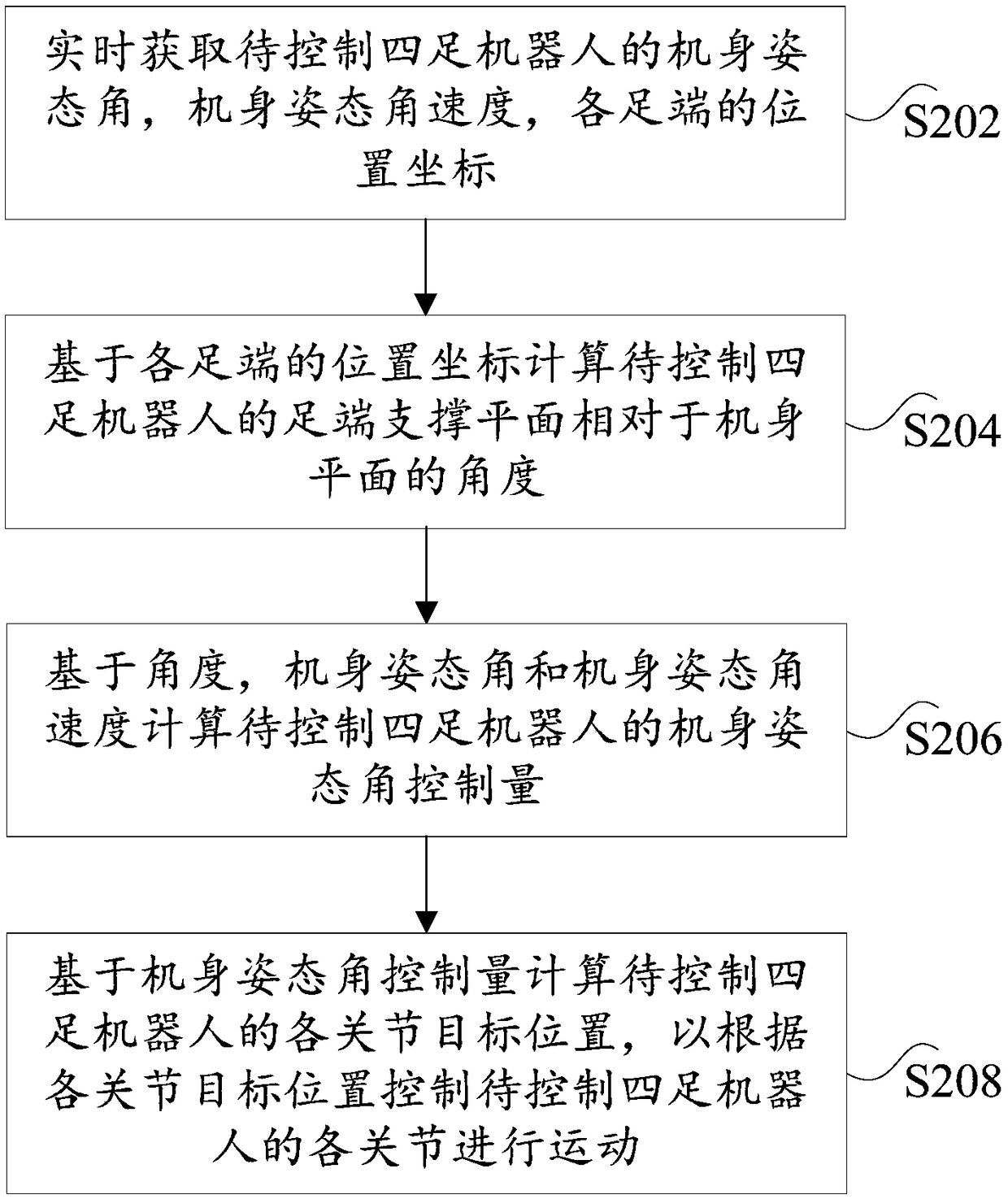
[0064] figure 2 It is a body posture control method of a quadruped robot according to an embodiment of the present invention, such as figure 2 As shown, the method includes the following steps:
[0065] Step S202, obtaining in real time the attitude angle of the body of the quadruped robot to be controlled, the angular velocity of the body attitude, and the position coordinates of each foot end;
[0066] In the embodiment of the present invention, the body attitude control method of th...
Embodiment 2
[0117] The embodiment of the present invention also provides a body attitude control device of a quadruped robot, the body attitude control device of the quadruped robot is mainly used to perform the body attitude control of the quadruped robot provided in the above-mentioned content of the embodiment of the present invention method, the body attitude control device of the quadruped robot provided by the embodiment of the present invention will be specifically introduced below.
[0118] Figure 7 is a schematic diagram of a body posture control device of a quadruped robot according to an embodiment of the present invention, such as Figure 7 As shown, the fuselage attitude control device of the quadruped robot mainly includes an acquisition module 10, a first calculation module 20, a second calculation module 30 and a third calculation module 40, wherein:
[0119] The acquisition module is used to obtain the body attitude angle of the quadruped robot to be controlled in real ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More