Hybrid reality interactive system based on passive tactile feedback
A mixed reality and interactive system technology, applied in the field of mixed reality interactive system, can solve problems such as high cost and poor virtual-real fusion effect, and achieve the effect of saving tracking costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be described in detail below with reference to the accompanying drawings and examples.
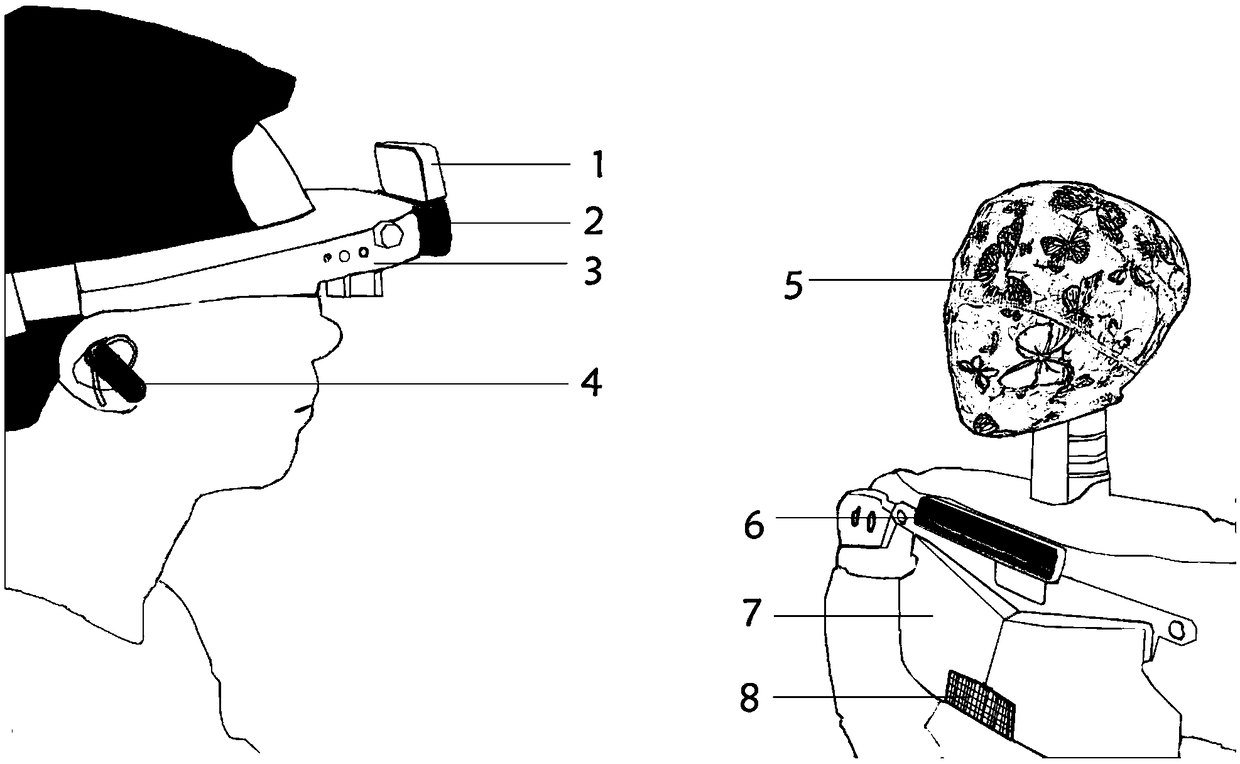
[0034] A mixed reality interactive system with passive haptic feedback, such as figure 1 As shown, its hardware composition includes a second depth camera 1, an RGB camera 2, an augmented reality head-mounted display 3, a headset 4, a first depth camera 6, a humanoid robot 7 with a marker point 5, and a microphone 8. The virtual human system uses a first depth camera 6 to collect the user's expression data as the input data of the system to drive the emotional model, thereby realizing the emotional interaction between the virtual human and the user. The mixed reality interactive system uses the microphone 8 to collect the voice data of the user, drives an intelligent dialogue program, uses the earphone 4 to play sound, and realizes the voice interaction between the virtual human and the user. The virtual human system uses a humanoid robot 7 as an entity o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com