

Mechanical arm space trajectory tracking dynamic compensation method and system
A trajectory tracking and dynamic compensation technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of complex dynamic models of manipulators, difficult to obtain dynamic models, and unsatisfactory control effects. Less resources, good real-time effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to make the technical solutions and advantages in the embodiments of the present application clearer, the exemplary embodiments of the present application will be further described in detail below in conjunction with the accompanying drawings. Apparently, the described embodiments are only part of the embodiments of the present application, and Not an exhaustive list of all embodiments. It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other.
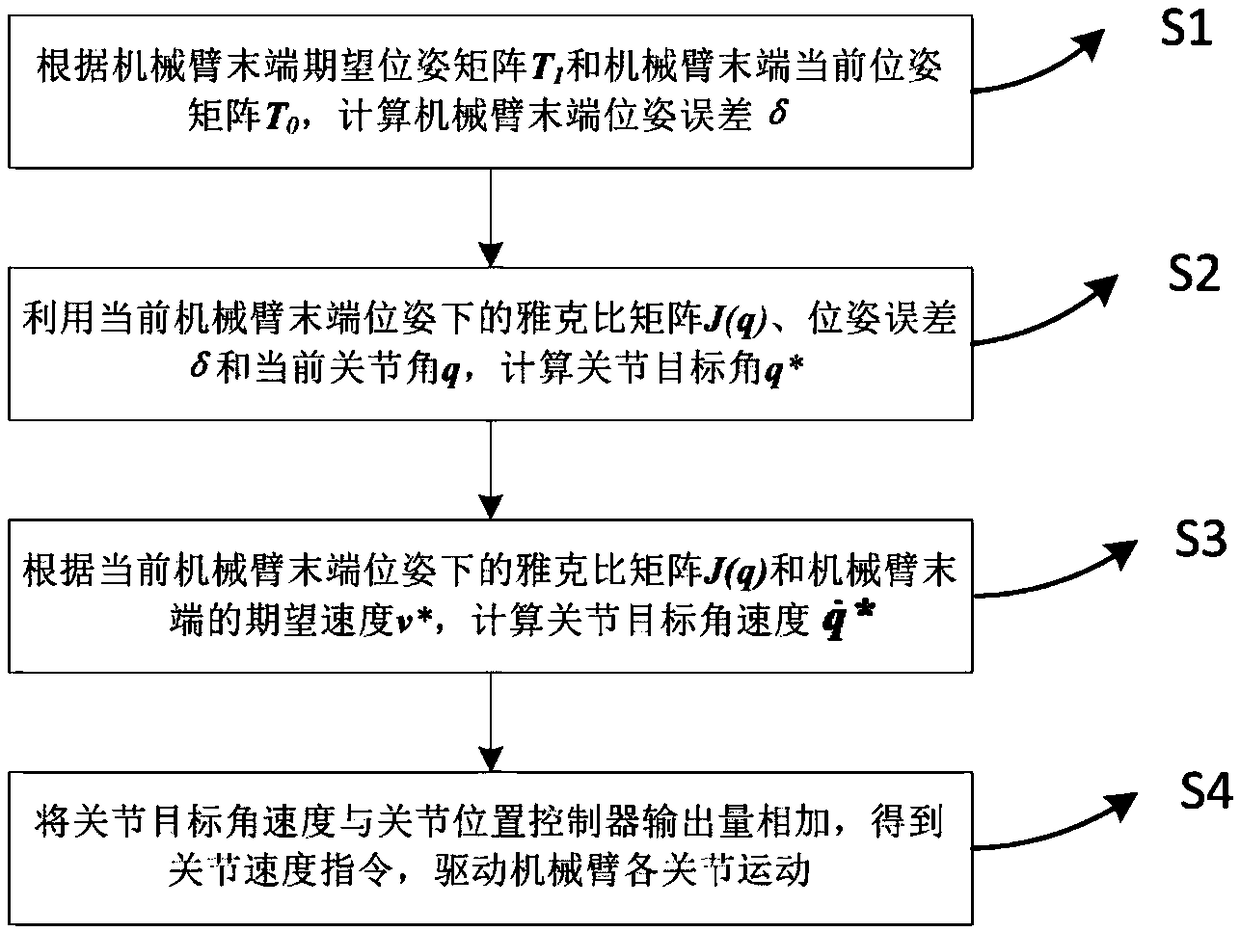
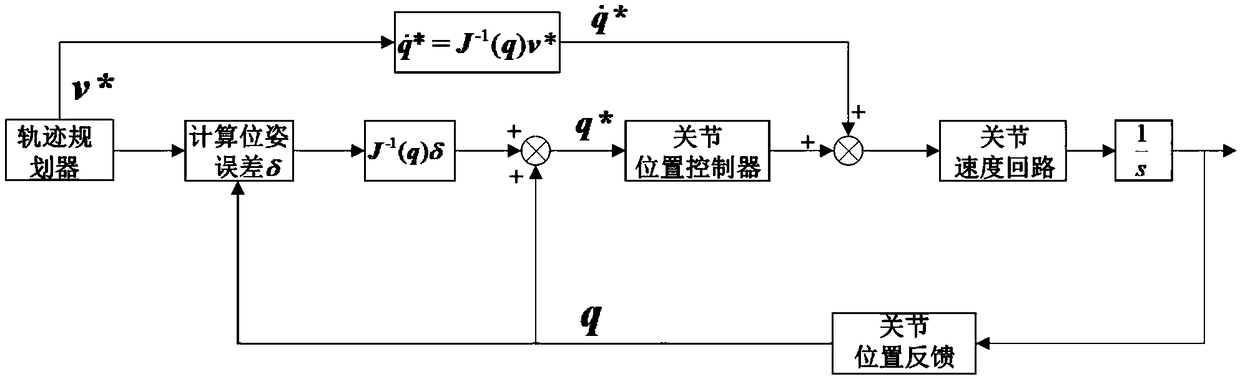
[0020] The core idea of this scheme is to directly obtain the target speed of each joint as the feed-forward amount through the spatial speed output by the terminal trajectory planning, without lag, and with good real-time performance.
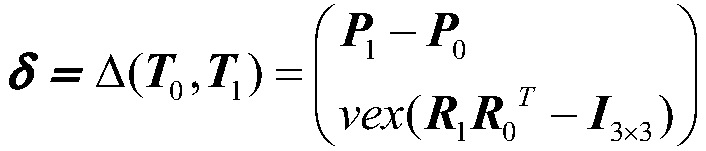
[0021] Such as figure 1 and figure 2 As shown, this solution discloses a dynamic compensation method for space trajectory tracking of a manipulator. This method does not need ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More