

Autonomous underwater vehicle path planning method based on improved ant colony algorithm
An underwater vehicle and path planning technology, applied in the direction of instruments, vehicle position/route/altitude control, non-electric variable control, etc. The effect of long calculation time, saving storage space, and reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the objectives, technical solutions and advantages of the present invention clearer, the technical solutions in the embodiments of the present invention will be described in more detail below in conjunction with the drawings in the embodiments of the present invention.
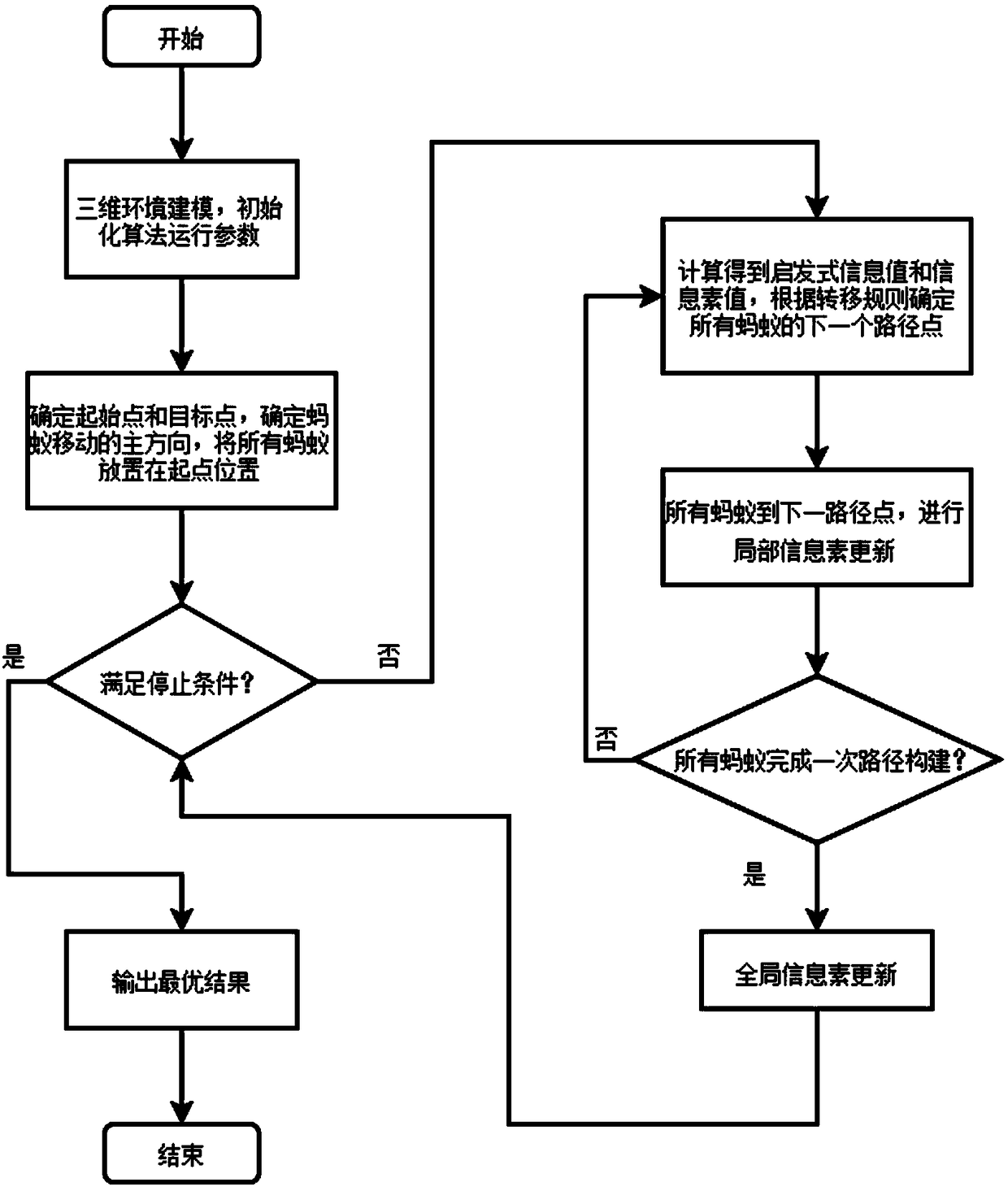
[0025] Specifically, as figure 1 Said, the steps of the autonomous underwater vehicle path planning method based on the improved ant colony algorithm specifically include:
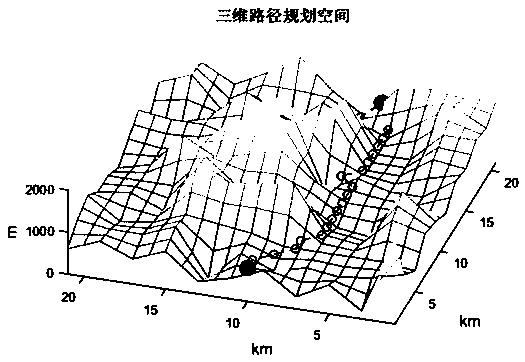
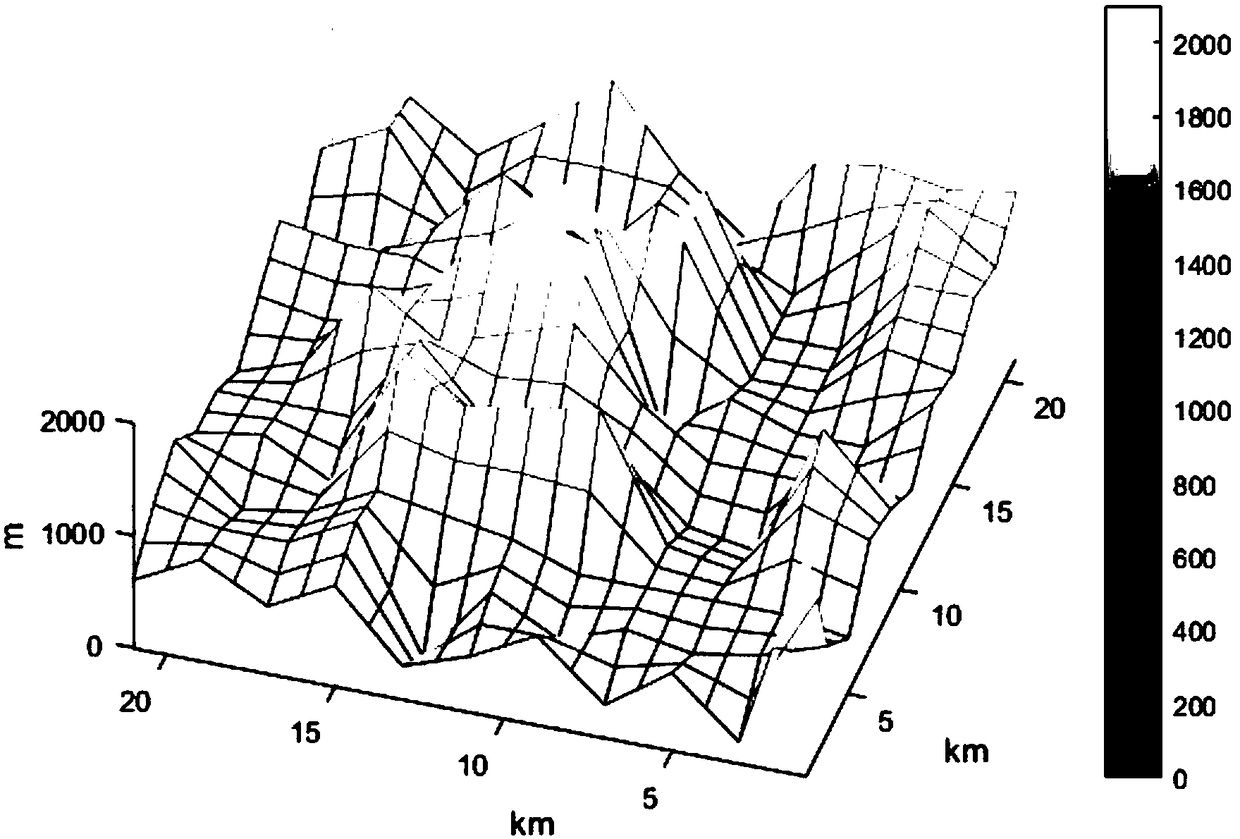
[0026] Step 1, build the environment model, initialize the parameters, input the basic data, tabu table tabu k Initialization, set the allowed list allowed k , determine the location of the starting point and the target point in the environment model.
[0027] Step 2. For any ant k, take the current node i as the center, and choose to go to the next node j according to the transfer rule.
[0028] Step 3, update the regular expression τ according to the local pheromone ijk =(1-μ)τ ijk +μ·τ 0 , to update the phe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More