

T-pipe welding robot
A welding robot and three-way pipe technology, which is applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of feeding, inability to process three-way pipes, and inability to adjust the angle of branch pipe fixtures, and is widely applicable. The effect of high stability, fast processing speed, and easy welding
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The following will be combined with Figure 1 to Figure 12 The present invention is described in detail, and the technical solutions in the embodiments of the present invention are clearly and completely described. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
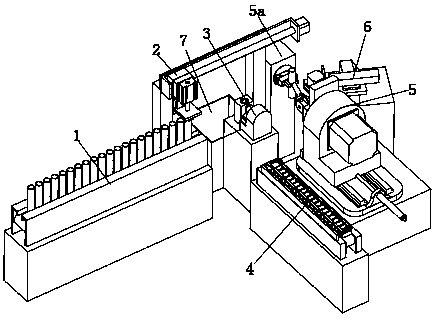
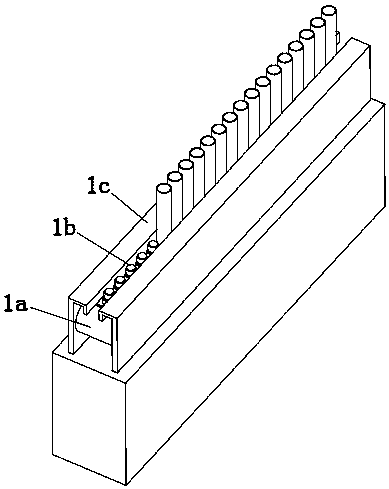
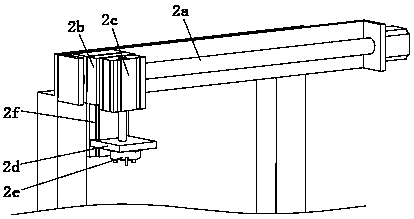
[0033] The present invention provides a kind of tee pipe welding robot here through improvement, as Figure 1-Figure 12As shown, it includes a main feeding mechanism 1, a transfer mechanism 2, a stamping mechanism 3, a branch pipe feeding mechanism 4, a positioning mechanism 5 and a laser welding device 6, and the punching mechanism 3 is located at the end of the main feeding mechanism 1. The transfer mechanism 2 is installed above the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More